EEN JURIDISCHE BLIK OP ETHISCHE
KWESTIES BIJ SOCIALE ROBOTS
Aantal woorden: 25.286
Bella Hovhannisyan
Stamnummer : 01603812
Promotor: Prof. Dr. Amy Van Looy
Masterproef voorgedragen tot het bekomen van de graad van:
Master in de Handelswetenschappen: Management en Informatica
PERMISSION
Ondergetekende verklaart dat de inhoud van deze masterproef mag geraadpleegd en/of
gereproduceerd worden, mits bronvermelding.
VOORWOORD
Met een voldaan gevoel draag ik deze masterproef voor tot het behalen van de graad van Master
in de Handelswetenschappen, afstudeerrichting management en informatica. Door de
uitzonderlijke omstandigheden waarin deze masterproef geschreven werd, dient tevens
opgemerkt te worden dat COVID-19 geen impact heeft gehad op dit onderzoek.
In de eerste plaats zou ik graag mijn promotor prof. Dr. Van Looy willen bedanken voor de
begeleiding en de vele uren die zij heeft besteed aan het lezen van dit werk. Met veel
dankbaarheid kijk ik terug op de kritische, doch rechtvaardige beoordeling van mijn promotor.
Daarnaast zou ik tevens graag alle personen willen bedanken die hebben bijgedragen aan mijn
onderzoek door deel te nemen aan een interview. Graag noem ik deze personen bij naam: Tony
Belpaeme, Tom Ederveen, Jochanan Eynikel, Brechtje Jansen, Michiel Joosse, Matthijs
Smakman, Thea Storm, Gino Vaes en Margo van Kemenade.
Een uitgebreid dankwoord gaat ook naar al mijn vrienden en collega-studenten voor de mooie
studententijd samen. Zonder hen was de weg naar dit punt een pak lastiger geweest. Naast het
doorstaan van blokperiodes waarin we elkaar steunden, wisten we ook de leukste plekken te
verkennen in Gent. Het zijn ongetwijfeld herinneringen die ik zal blijven koesteren.
Verder wil ik ook alle personen bedanken die hun kostbare tijd besteed hebben aan het nalezen
van dit werk. Hun kritische opmerkingen worden zeker geapprecieerd.
Tenslotte wil ik in het bijzonder mijn ouders graag bedanken. Zij stonden steeds aan mijn zijde,
niet enkel tijdens het schrijven van deze masterproef, maar ook gedurende de volle vier jaren
van mijn studie aan de UGent. Ik ben zeker ook een dankwoord verschuldigd aan mijn oudere
zus Laura, die altijd voor mij klaarstond en mij moed toesprak. Bedankt om een voorbeeld te
zijn naar wie ik kan opkijken en vooral bedankt om in mij te geloven, ook in tijden waar ik het
soms zelf niet meer deed.
Inhoudsopgave
Lijst van gebruikte afkortingen
... VII
Lijst van gebruikte tabellen
... VIII
Lijst van gebruikte figuren
... IX
1. Inleiding
... 1
2. Literatuurstudie
... 2
2.1 Digitalisering in de samenleving ... 3
2.2 Robots ... 4
2.2.1 Definitie ... 4
2.2.3 Verschillende typen robots en hun eigenschappen ... 5
2.2.4 Robots in de maatschappij ... 9
2.2.5 De robot en de mens ... 11
2.3 Ethiek en rechten ... 14
2.3.1 Ethiek en moraliteit ... 14
2.3.2 Rechten en rechtspersoonlijkheid ... 15
2.3.3 Aansprakelijkheid ... 16
2.3.4 Privacy ... 17
2.4 Sociale robots, ethiek en rechten ... 18
2.4.1 Morele agenten en ethiek ... 19
2.4.2 Robotethiek en wetgeving ... 21
2.4.3 Zijn sociale robots dieren? ... 24
2.4.4 Sociale robots en ouderdom ... 25
2.5 Onderzoek tot op heden ... 28
2.5.1 SLR-protocol ... 28
2.5.2 Bestaande studies over ethiek bij sociale robots in de ouderenzorg ... 35
3.3.1 Operationalisering van de vragenlijst ... 47
3.3.2 Operationalisering van de data-analyse ... 47
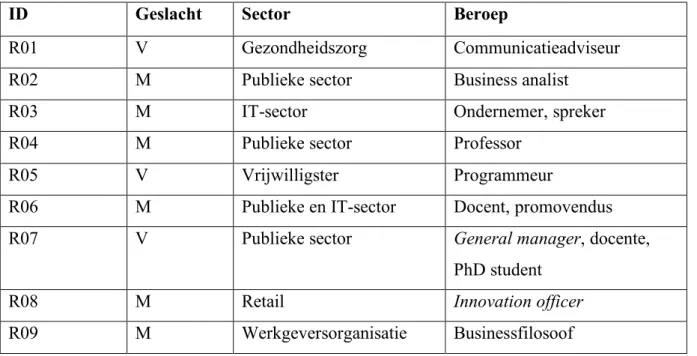
3.3.3 Voorstelling van de respondenten ... 48
3.4 Relevantie ... 52
3.4.1 Wetenschappelijke relevantie ... 52
3.4.2 Maatschappelijke relevantie ... 52
3.5 Evaluatiecriteria ... 53
3.5.1 Betrouwbaarheid... 53
3.5.2 Validiteit... 53
3.6 Informatie over het empirisch onderzoek ... 54
4. Resultaten
... 55
4.1 Impact sociale robots in de ouderenzorg op vlak van ethiek ... 55
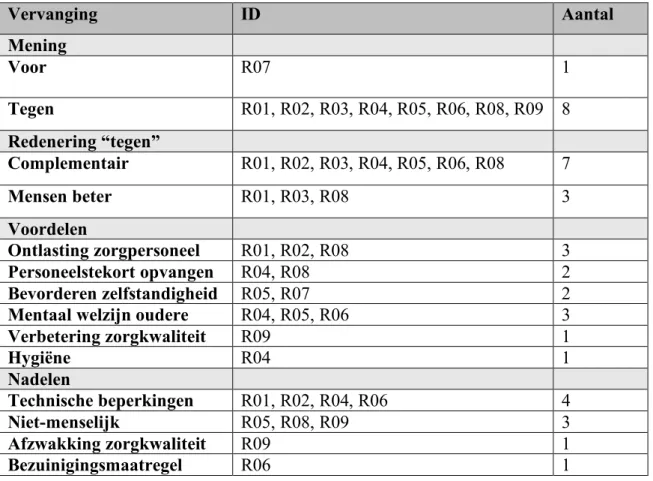
4.1.1 Vervanging zorgverleners door sociale robots ... 55
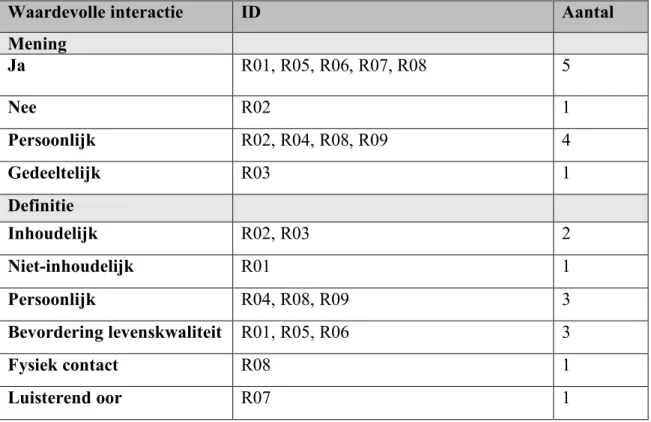
4.1.2 Waardevolle interactie en morele competenties ... 59
4.3.3 Impact op de evolutie van menselijke interactie ... 62
4.2 De rol van wetgeving bij sociale robots op ethisch vlak ... 63
4.2.1 Aansprakelijkheid van sociale robots ... 63
4.2.2 Rechtspersoonlijkheid van sociale robots ... 67
4.4.3 Verantwoordelijkheid, vertrouwen en wetgeving ... 69
4.3 De vergelijking van sociale robots met dieren op vlak van ethiek ... 74
4.3.1 Beschermen van een sociale robot... 74
4.3.2 De stelling van Kant ... 75
4.3.3 Invloed van sociale robots op kinderen ... 77
5. Discussie
... 79
5.1 Vervanging binnen de ouderenzorg ... 79
5.2 Wetgeving, aansprakelijkheid en rechtspersoonlijkheid van sociale robots ... 80
5.3 De vergelijking van sociale robots met dieren ... 82
5.4 Beperkingen van het onderzoek en toekomstig onderzoek ... 83
6. Conclusie
... 84
Bibliografie
... X
Bijlagen ... 1
Bijlage 3: Interview 1, Brechtje Jansen ... 5
Bijlage 4: Interview 2, Michiel Joosse ... 17
Bijlage 5: Interview 3, Tom Ederveen ... 24
Bijlage 6: Interview 4, Tony Belpaeme... 32
Bijlage 7: Interview 5, Thea Storm ... 45
Bijlage 8: Interview 6, Matthijs Smakman ... 53
Bijlage 9: Interview 7, Margo van Kemenade ... 61
Bijlage 10: Interview 8, Gino Vaes ... 69
Bijlage 11: Interview 9, Jochanan Eynikel ... 76
Lijst van gebruikte afkortingen
AI
Artificiële Intelligentie
AIIA
Artificiële Intelligentie Impact Assessment
BSI
British Standards Institution
GAI
Gedragscode Artificiële Intelligentie
HRI
Human Robot Interaction
IT
Information Technology
Lijst van gebruikte tabellen
Tabel 1: Typen en eigenschappen van robots ... 9
Tabel 2: SLR-protocol... 28
Tabel 3: Overzicht bestaande studies ... 30
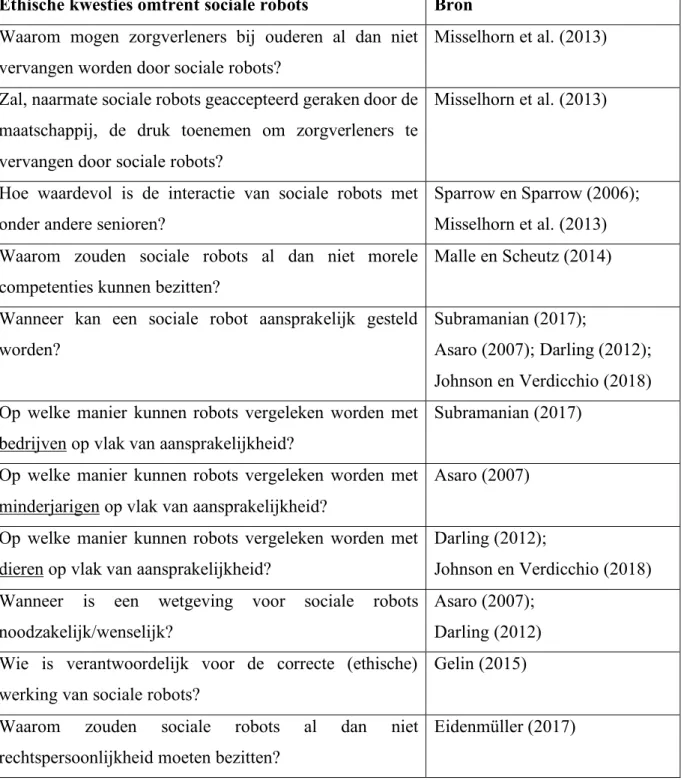
Tabel 4: Overzicht van ethische kwesties bij sociale robots ... 40
Tabel 5: Overzicht bevraagde personen ... 51
Tabel 6: Vervanging zorgverleners door sociale robots ... 56
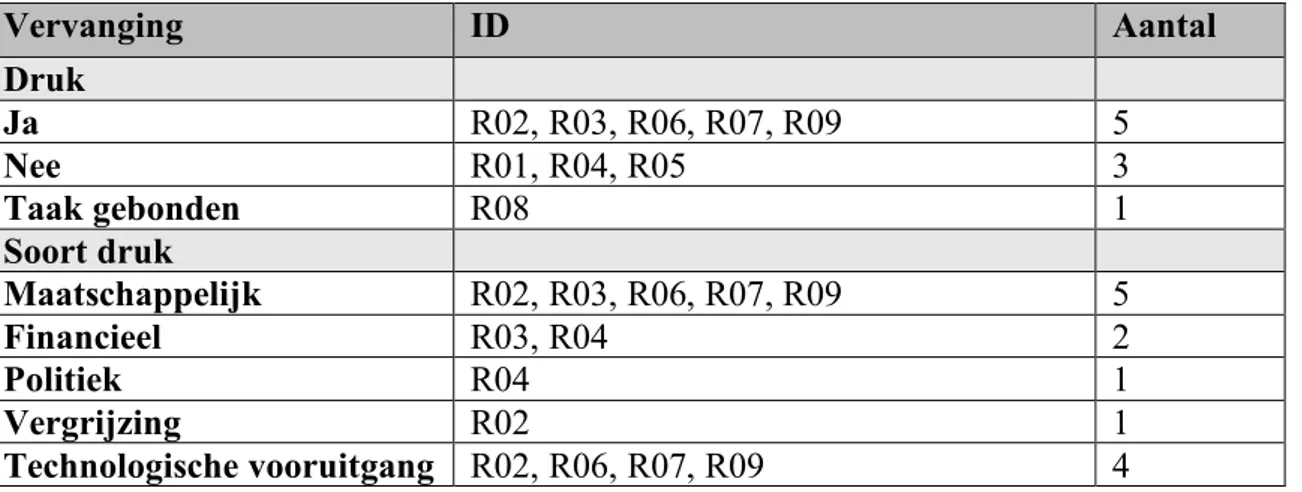
Tabel 7: Toenemende druk voor vervanging zorgpersoneel door sociale robots ... 57
Tabel 8: Type taken bij overname door sociale robots ... 58
Tabel 9: Ethische gevolgen van vervanging door sociale robots ... 58
Tabel 10: Waardevolle interactie bij sociale robots ... 60
Tabel 11: Morele competenties bij sociale robots ... 61
Tabel 12: Impact sociale robots op evolutie menselijke interactie ... 62
Tabel 13: Aansprakelijkheid bij sociale robots ... 63
Tabel 14: Vergelijking sociale robots met bedrijven ... 64
Tabel 15: Vergelijking sociale robots met minderjarigen ... 65
Tabel 16: Vergelijking sociale robots met dieren ... 66
Tabel 17: Beste vergelijking sociale robot op vlak van aansprakelijkheid ... 67
Tabel 18: Rechtspersoonlijkheid toekennen aan sociale robots ... 68
Tabel 19: Toekennen rechten en plichten aan sociale robots ... 69
Tabel 20: Verantwoordelijkheid correcte ethische werking sociale robot ... 70
Tabel 21: Vertrouwen van sociale robots ... 71
Tabel 22: Licenties en opleidingen bij gebruik sociale robots ... 72
Tabel 23: Noodzakelijkheid en wenselijkheid wetgeving omtrent sociale robots ... 74
Tabel 24: Beschermen van sociale robots ... 75
Lijst van gebruikte figuren
Figuur 1: Raamwerk classificatie van sociale robots (Bartneck & Forlizzi, 2004, p. 592) ... 7
Figuur 2: Niveaus van autonomie (Crootof, 2015, p. 1864) ... 8
Figuur 3: Het griezelvallei effect (Mori, MacDorman & Kageki, 2012, p. 99) ... 13
1. Inleiding
Sociale robots komen langzaamaan steeds vaker voor in de huidige maatschappij. Het aantal
verschillende toepassingen blijft toenemen. Hierbij zijn er veel voordelen, zoals ouderen die
begeleid kunnen worden door een sociale robot (Gelin, 2015). Echter, dergelijke toepassingen
roepen al snel ethische vragen op. Dit komt mede doordat er nog geen wettelijke bepalingen
zijn omtrent sociale robots specifiek. Hoe ethisch zijn dergelijke robots bij ouderen? Waarom
zou er al dan niet een wetgeving moeten komen? Kunnen ze vergeleken worden met dieren?
Deze masterproef tracht een antwoord te geven op dergelijke vragen. Er wordt namelijk
onderzocht wat de visie is van experten op bepaalde ethische kwesties omtrent sociale robots.
Op deze manier kan een beeld gevormd worden van de ethiek bij sociale robots en de
wenselijkheid van een wetgeving. Ter afsluiting worden er uiteindelijk beleidsadviezen
geformuleerd.
2. Literatuurstudie
In deze literatuurstudie zal eerst kort de digitaliserende samenleving besproken worden. Daarna
zullen robots in het algemeen bekeken worden en in de loop van dit werk wordt er specifieker
ingegaan op sociale robots.
Vermits ethiek en rechten zeer breed opgevat kunnen worden, zullen deze concepten
ook nader toegelicht worden in het derde deel van de literatuurstudie. Dit zal zorgen voor een
afbakening van deze begrippen.
Verder zal het vierde deel een combinatie bevatten van beide hoofdconcepten, met name
sociale robots en de ethische/juridische kwesties met betrekking tot dit soort robots.
Uiteindelijk wordt de literatuurstudie afgesloten met een vergelijking van bestaande
onderzoeken. Dit zal resulteren in een overzichtelijke weergave van nieuwe
onderzoeksmogelijkheden voor in de toekomst.
2.1 Digitalisering in de samenleving
De huidige maatschappij krijgt te maken met digitalisering en robotisering (Van Humbeeck,
Buyse, Knaepen, & Morsink, 2017). Alhoewel er volgens Van Humbeeck et al. (2017) nog
geen sprake is van een digitale samenleving, zijn er toch reeds bepaalde invloeden die
ondervonden kunnen worden, schrijven de auteurs. Er is ook een toenemende angst voor
robotisering en automatisering (Van Lancker, 2018). Vooral de bouw, transport, landbouw,
industrie en dienstverlening zijn sectoren die kwetsbaar zijn voor deze twee fenomenen (Van
Lancker, 2018).
De grootste groei van robots vindt plaats in de industrie, waarbij er sprake is van industriële
robots (Hindriks, 2017). De ontwikkeling, waarbij menselijke arbeid op grote schaal vervangen
wordt door machines, wordt de robothypothese genoemd (Thomas, 2015). Zo zullen onder
andere bepaalde jobs verdwijnen en andere ontstaan (Van Lancker, 2018). Echter, ook in het
dagelijks leven zullen steeds meer robots aanwezig zijn (Hindriks, 2017).
Verder heeft de robothypothese niet enkel een invloed op de arbeidsmarkt, maar ook op het
onderwijs (Thomas, 2015). Zo zullen er als gevolg van technische veranderingen bepaalde
vaardigheden bevoordeeld worden (Card & DiNardo, 2002). Dit zijn vaardigheden, zoals
bijvoorbeeld creativiteit en veerkracht, waarmee men zich kan gaan onderscheiden van
machines (Thomas, 2015). Het hoger onderwijs wordt ook steeds belangrijker, stelt Thomas
(2015). Echter, volgens Goldin en Katz (2009) maakt een diploma iemand niet langer
onmisbaar.
Ten slotte heeft technologische vooruitgang reeds in het verleden gezorgd voor grote
veranderingen in de samenleving (Van Lancker, 2018). Na de industriële revoluties van
vroeger, komt er ook nu een nieuw technologisch tijdperk dichterbij met disruptieve
2.2 Robots
2.2.1 Definitie
Alle robots zijn machines, maar niet alle machines zijn robots (Loh, 2019). De definitie van een
machine is volgens Loh (2019): “an artificial structure that consists of individual parts moved
by a drive system (motor, wind, water, etc.) and converts energy.” (p. 6).
Daarnaast definieert Turney (2015) een robot als: “oorspronkelijk een mensachtige machine die
menselijke arbeid overnam, . . . . Robots worden nog altijd vaak als mensachtig voorgesteld,
maar de term wordt ook gebruikt voor alle toestellen of computerprogramma’s die enige vorm
van ‘agency’ (gericht handelen) vertonen of nabootsen.” (p. 13). Hierbij ligt de nadruk op de
taak en het uiterlijk van robots. Fong, Thorpe en Baur (2003) definiëren robots als machines of
toestellen die taken kunnen uitvoeren op vraag van mensen.
Het voorgaande begrip mag echter niet verward worden met robotica die gedefinieerd
wordt als “. . . een bredere term dan robot en heeft betrekking op computertoepassingen die in
het dagelijks leven zijn geïntegreerd, zoals de personal assistant in je smartphone, het
navigatiesysteem in je auto en de intelligente thermostaat in je huis.” (Turney, 2015, p.13).
Hieruit kan afgeleid worden dat robots wel robotica zijn, maar niet alle robotica zijn robots.
Verder kan ook specifiek een sociale robot gedefinieerd worden. Darling (2012) beschrijft een
sociale robot als: “a physically embodied, autonomous agent that communicates and interacts
with humans on a social level.” (p. 2). In deze definitie wordt er benadrukt dat de focus op
interactie met mensen ligt. Daarnaast is er ook nog een algemene, maar gelijkaardige definitie,
namelijk: “. . . machines that are able to interact with one another and/or with humans in social
ways.” (Sandry, 2015, p.335). Ook de volgende definitie benadrukt de sociale interactie met de
mens: “Een sociale robot is een robot die met mensen kan communiceren.” (Hindriks, 2017,
p13). Sheridan (2020) legt ook de nadruk op interactie, maar linkt dit aan het verschil met
industriële robots. De onderzoeker definieert sociale robots namelijk als “one whose purpose
is to serve a person in a caring interaction rather than to perform a mechanical task.” (p. 7).
Bovendien definieert Breazeal (2003) sociale robots als: “. . . the class of robots that
Nourbakhsha en Dautenhahn (2003) meer op de karakteristieken van de robot zelf. Hun
definitie luidt als volgt: “Social robots are embodied agents that are part of a heterogeneous
group. . . . They are able to recognize each other and engage in social interactions, they possess
histories (perceive and interpret the world in terms of their own experience), and they explicitly
communicate with and leam from each other.” (p. 144). Daarnaast definiëren Bartneck en
Forlizzi (2004) sociale robots als “. . . products that facilitate co-experience and social
interaction.” (p. 592).
Ten slotte bestaan binnen de groep van sociale robots ook specifiekere soorten, zoals de sociale
assistentie robots (SAR) en de humanoïde robots. SAR zijn robots die sociale interactie en
assistentie verlenen aan de gebruiker, zonder dat fysiek contact hierbij noodzakelijk is (Di
Nuovo et al., 2017). Humanoïde robots zijn ook sociale robots, maar vertonen gelijkenissen
met mensen op vlak van gedrag en uiterlijk (Johnson & Verdicchio, 2018). Deze gelijkenissen
worden steeds sterker, waardoor er speculaties zijn dat mensen in de toekomst een humanoïde
robot boven een echt mens zouden verkiezen als levenspartner (Johnson & Verdicchio, 2018).
2.2.3 Verschillende typen robots en hun eigenschappen
Bovendien zijn er binnen de groep van robots ook verschillende soorten robots. Ut infra zullen
enkele van de typen robots besproken worden samen met hun eigenschappen die ervoor zorgen
dat ze onderscheiden worden van de andere robots. Deze lijst is echter niet bedoeld om
allesomvattend te zijn, maar om een beeld te schetsen van robots die relevant zijn binnen deze
literatuurstudie.
Ten eerste schreven Royakkers, Daemen en van Est in 2012 dat er twee groepen van robots
kunnen onderscheiden worden, namelijk service robots en industriële robots. Service robots
zijn alle robots die, al dan niet autonoom, een bepaald nut bijbrengen aan mensen en instanties,
maar niet ingezet worden in fabrieken (Royakkers et al., 2012). Ze verlenen diensten, zorg en
In tegenstelling tot de service robots, worden industriële robots voornamelijk ingezet bij
massaproductie in fabrieken doordat ze beperkt zijn tot een specifiek aantal taken (Ebel, 1986).
Ze worden dan ook door de Internationale Organisatie voor Standaardisering (ISO)
gedefinieerd als een “automatically controlled, reprogrammable, multipurpose, manipulator
programmable in three or more axes, which may be either fixed in place or mobile for use in
industrial automation applications.” (ISO 8373). Zoals reeds besproken in sectie 1 van deze
literatuurstudie, hebben deze robots een grote impact op de arbeidsmarkt en dus op de
samenleving.
Daarnaast kan men ook een andere groep van robots onderscheiden, namelijk de sociale robots.
Deze werden reeds gedefinieerd in sectie 2.1. Breazeal schreef in 2003 dat er binnen deze groep
vier verschillende soorten sociale robots bestaan, namelijk: sociaal suggestieve, sociale
interface, sociaal ontvankelijke en sociaalvriendschappelijke robots. Daarenboven is de
humanoïde robot een specifieke sociale robot met menselijke kenmerken die flexibel kan
werken en kan ingezet worden voor een wijde selectie aan taken (Adams, Breazeal, Brooks, &
Scassellati, 2000). Dit is dan ook het grootste verschil met industriële robots, die worden
namelijk in een vaste omgeving ingezet voor een klein bereik aan taken (Adams et al., 2000).
Ook nemen sociale robots beslissingen op basis van hun interne staat en percepties, terwijl
industriële robots zich baseren op zeer specifiek geprogrammeerde commando’s (Scheutz,
2012). Het feit dat sociale robots in staat zijn om gedeeltelijk zelf te beslissen over het gedrag
en de acties die ze vertonen, is dan ook een verschilpunt met niet-sociale robots (Lutz & Tamò,
2015).
Bartneck en Forlizzi (2004) beschrijven in hun onderzoek een raamwerk waarmee
sociale robots geclassificeerd kunnen worden op basis van hun vorm, modaliteit, sociale
normen, mate van autonomie en interactiviteit. In dat raamwerk staat het ontwerp van de robot
centraal. Onder ‘vorm’ verstaat men niet enkel de vorm, maar ook de materialen en
gedragseigenschappen van de robot. Deze vorm kan volgens de auteurs abstract, biomorf of
antropomorf zijn. Biomorf betekent dat de robot een levensecht object nabootst, terwijl
antropomorf verwijst naar het nabootsen van een mens (Bartneck & Forlizzi, 2004). Modaliteit
beschrijven Bartneck en Forlizzi (2004) als het aantal betrokken communicatiekanalen. Hierbij
kan het volgens deze onderzoekers om een of meerdere communicatiekanalen gaan,
beïnvloed door het gedrag van andere leden binnen een sociale groep, hierbij spreekt men van
sociale normen (Bartneck & Forlizzi, 2004). Deze sociale normen worden verkregen door
middel van interactie tussen mensen (Bartneck & Forlizzi, 2004). Hierdoor stellen Bartneck en
Forlizzi (2004) dat ze ook gedefinieerd kunnen worden door interacties tussen mensen en
robots. Daarnaast is ook autonomie opgenomen in het raamwerk. Dit wordt gedefinieerd als “.
. . having the technological capabilities to act on behalf of humans without direct input from
humans.” (Bartneck & Forlizzi, 2004, p. 593). Een robot kan geen, enige of volledige
autonomie bezitten, stellen Bartneck en Forlizzi (2004). Tenslotte kan een sociale robot volgens
de onderzoekers ook geclassifieerd worden op basis van de mate van interactiviteit. De
onderzoekers definiëren dit als volgt: “. . . having the potential to exhibit causal behavior - that
is, to respond in reaction to interaction with a human.” (p. 593).
Onderstaande figuur geeft het raamwerk weer voor de classificatie van sociale robots dat ut
supra besproken werd.
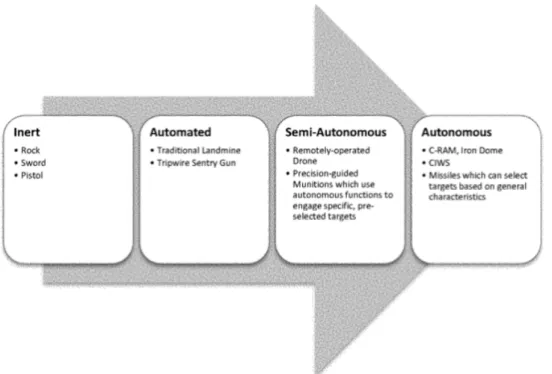
zijn autonome wapensystemen die Crootof (2015) definieert als “a weapon system that, based
on conclusions derived from gathered information and preprogrammed constraints, is capable
of independently selecting and engaging targets.” (p. 1837). Zoals figuur 2 ut infra aantoont,
zijn er hierbij verschillende niveaus van autonomie.
Figuur 2: Niveaus van autonomie (Crootof, 2015, p. 1864)
Verscheidene auteurs zijn kritisch over hoe ethisch dergelijke militaire robots zijn, aangezien
ze ook wel moordende robots worden genoemd (Lokhorst & van den Hoven, 2012). Echter,
Lokhorst en van den Hoven (2012) wijzen erop dat niet elke militaire robot een moordende
robot is, en indien dit toch het geval is, het ook op ethisch correcte wijze kan gebeuren.
Tenslotte is er ook een vijfde soort robots, namelijk de autonoom mobiele robots. Deze robots
kunnen bewegingen uitvoeren en/of zich verplaatsen op zelfstandige basis (Siegwart,
Nourbakhsh, & Scaramuzza, 2011). De robots worden in verschillende sectoren ingezet,
bijvoorbeeld de farmaceutische sector en de auto-industrie (Fahimi, 2009). Een voorbeeld van
een autonoom mobiele robot die Fahimi (2009) in zijn werk beschrijft is de autoachtige robot.
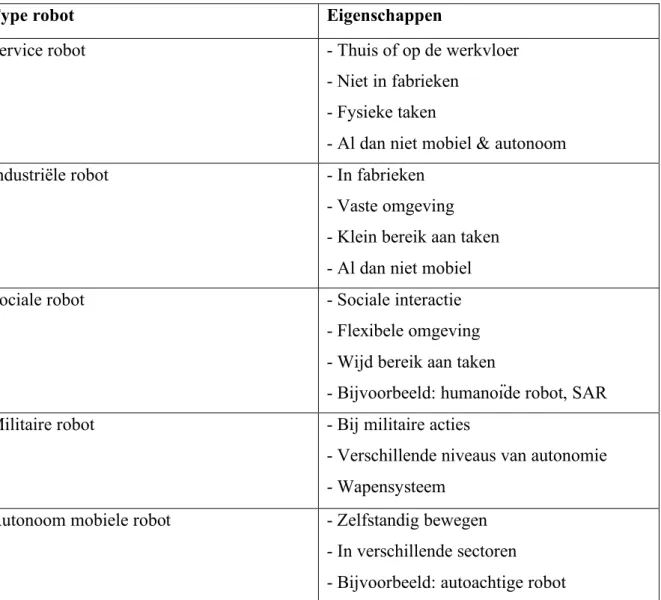
Tabel 1 vat de verschillende eigenschappen per besproken type robot samen.
Tabel 1: Typen en eigenschappen van robots
Type robot
Eigenschappen
Service robot
- Thuis of op de werkvloer
- Niet in fabrieken
- Fysieke taken
- Al dan niet mobiel & autonoom
Industriële robot
- In fabrieken
- Vaste omgeving
- Klein bereik aan taken
- Al dan niet mobiel
Sociale robot
- Sociale interactie
- Flexibele omgeving
- Wijd bereik aan taken
- Bijvoorbeeld: humanoïde robot, SAR
Militaire robot
- Bij militaire acties
- Verschillende niveaus van autonomie
- Wapensysteem
Autonoom mobiele robot
- Zelfstandig bewegen
- In verschillende sectoren
- Bijvoorbeeld: autoachtige robot
2.2.4 Robots in de maatschappij
De hierboven besproken typen robots bevinden zich reeds in de huidige maatschappij en kennen
ook tal van toepassingen (Lin, 2012). Enkele toepassingen bij kinderen met autisme, in de
ouderenzorg, binnen het onderwijs en bij mensen thuis zullen hierna besproken worden ter
‘sociale verhalen’ aan autistische kinderen. De auteurs Vanderborght, et al. (2012) omschrijven
deze “sociale verhalen” als korte scenario’s om autistische personen correct te leren handelen
in sociale situaties door deze beter te doen begrijpen. Kinderen met autisme ondervinden
namelijk moeilijkheden bij sociale interactie (Vanderborght et al., 2012), alsook bij het
identificeren van emoties in specifieke situaties (Pop et al., 2013). Kinderen die moeilijkheden
ondervinden bij sociale communicatie, hebben potentieel baat bij deze sociale robots (Ismail,
Hanapiah, Belpaeme, Dambre, & Wyffels, 2020). Bovendien interageren ze liever met
objecten, zoals robots, dan met mensen, waardoor deze kinderen er op sociaal vlak beter op
vooruitgaan indien een robot de ‘sociale verhalen’ voorleest (Vanderborght et al., 2012).
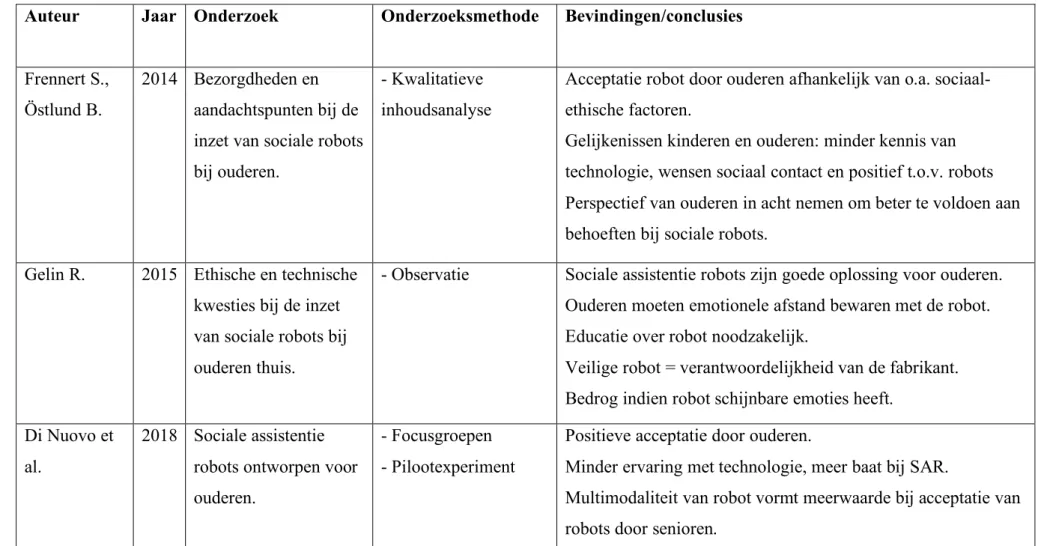
Een tweede toepassing is de sociale assistentie robot bij ouderen. Deze werd reeds gedefinieerd
in sectie 1.1. Robots die sociale interactie hebben met mensen zorgen bij hun voor een stijging
van positieve gevoelens en een stijgende wil tot interactie (Fraune et al., 2020). Uit het
onderzoek van Di Nuovo et al. (2018) bleek dit ook het geval te zijn bij ouderen. In hun
onderzoek hadden ouderen die minder ervaren waren met technologische toestellen, het meeste
baat bij dergelijke sociale assistentie robots.
Een concreet voorbeeld van het voorgaande is de zeehond Paro. Deze robot wordt ingezet in
residenties waar ouderen verblijven (Leite, Martinho, & Paiva, 2013). Dit gebeurt bijvoorbeeld
bij de behandeling van patiënten met dementie (Darling, 2012). Uit het onderzoek van Di
Nuovo et al. (2018), waarbij twee Paro robots werden ingezet in de residentie, bleek dat deze
voor een sterkere sociale band zorgden tussen de ouderen van de residentie. Bovendien
ontwikkelden deze ouderen een matige tot sterke band met de robot, waardoor het gevoel van
eenzaamheid verminderde (Robinson, MacDonald, Kerse, & Broadbent, 2013).
Di Nuovo et al. (2018) stelden tevens vast dat het stressgehalte van de ouderen verlaagd
was nadat Paro in de residentie werd gebruikt. Naast deze voordelen, dient ook opgemerkt te
worden dat sociale robots door het publiek gezien worden als duur (Di Nuovo et al., 2017).
Ondanks het feit dat sociale robots in bepaalde situaties reeds fungeren als surrogaat voor een
mens (Subramanian, 2017), mogen ze in dit geval enkel ter assistentie van het zorgpersoneel
dienen en hen dus niet vervangen (Runhaar, 2014). Ook Barata (2019) deelt deze mening in
haar onderzoek.
Bovendien zijn er ook nog toepassingen binnen het onderwijs. Sociale robots zouden dezelfde
voordelen hebben voor studenten zoals virtuele pedagogische agenten die reeds gebruikt
worden in het onderwijs (Di Nuovo et al., 2017). Uit het onderzoek van Di Nuovo et al. (2017)
blijken jongere kinderen meer betrokken te zijn met robots. Een mogelijke oorzaak is dat
jongere kinderen minder verwachtingen hebben over het gedrag van de robot en het meer zien
als speciaal of nieuw speelgoed (Di Nuovo et al., 2017). Eén van de robots in het onderzoek
van Di Nuovo et al. (2017) is Robovie, een robot die gebruikers kan herkennen en Engels kan
spreken. Hierbij bleek de implementatie van nieuw gedrag belangrijk te zijn om de jonge
gebruikers betrokken te houden bij dergelijke robots (Di Nuovo et al., 2017).
Verder kennen robots ook toepassingen bij mensen thuis. Een voorbeeld hiervan is de
robotdinosaurus Pleo, een interactief speeltje voor kinderen thuis (Fernaeus, Håkansson,
Jacobsson, & Ljungblad, 2010). In het onderzoek van Fernaeus et al. (2010) bleek dat de
kinderen Pleo als een echt dier behandelden door bijvoorbeeld het te aaien of het een naam te
geven. Het onderzoek toonde echter ook aan dat dit niet voldoende was om op lange termijn de
kinderen geïnteresseerd te houden in Pleo.
Ten slotte blijken ouderen en kinderen gelijkenissen te vertonen bij de acceptatie van deze
robots (Frennert & Östlund, 2014). Ze hebben beiden weinig kennis van de achterliggende
technologie, een groot verlangen naar sociaal contact en bovendien vertonen beide groepen een
positief gedrag tegenover robots (Frennert & Östlund, 2014). Acceptatie van dergelijke robots
is dan ook cruciaal bij de relatie tussen robots en ouderen (Frennert & Östlund, 2014).
2.2.5 De robot en de mens
Bij de hierboven besproken toepassingen blijkt interactie tussen robots en mensen een
aanzienlijke rol te spelen. Toepassingen van robots in ziekenhuizen, scholen, residenties, etc.
leiden dan ook tot human-robot interaction (HRI) (Azmin, Shamsuddin, & Yussof, 2016). Er
informatieverwerving en -analyse uit de omgeving. Ze omschrijven actie als de reactie van de
robot nadat het signalen heeft ontvangen. Daarnaast stellen deze onderzoekers dat het
intermediair mechanisme slaat op het “geheugen” van de robot die de perceptie en actie met
elkaar verbindt. HRI fungeert dan ook als brug tussen een sociale robot en de omgeving waarin
het zich bevindt (Yan et al., 2014).
Bovendien bepaalt, bij de relatie tussen een robot en een mens, het uiterlijk hoe de interactie
wordt opgebouwd en ervaren (Coeckelbergh, 2010). Natuurlijke HRI is dan ook een vorm van
HRI waarbij mensachtige robots op dezelfde manier interactie voeren met mensen zoals mensen
onderling (Kanda, 2010). Echter, opdat mensen interactie zouden voeren met sociale robots,
zijn menselijke uiterlijke kenmerken bij de robot geen vereiste (Onyeulo & Gandhi, 2020).
Dergelijke kenmerken kunnen wel ten goede komen van de interactie tussen een mens en een
robot (Onyeulo & Gandhi, 2020). Deze kenmerken zorgen namelijk voor meer affiniteit (Mori,
MacDorman, & Kageki, 2012). Sociale robots zijn dan ook de robots die het vaakst ontworpen
worden met menselijke kenmerken (Sandry, 2015). Deze kenmerken zorgen ervoor dat
interactie met de robot toegankelijker wordt voor de mens (Sandry, 2015). Bij dergelijke robots
is het gezicht belangrijk, aangezien deze een invloed heeft op de eerste indruk die mensen
vormen (Broadbent et al., 2013). Daarbij zijn de ogen het belangrijkste, want daaruit kan de
levendigheid van degene waarmee men interactie heeft, afgeleid worden (Looser & Wheatley,
2010). Tevens Stroessner en Benitez (2019) ondervonden in hun onderzoek dat mensen een
voorkeur hebben voor robots met meer menselijke gezichtskenmerken, maar ook vooral
vrouwelijke robots. Daarnaast schreven Onyeulo en Gandhi (2020) dat het niet vereist is dat
een robot op dezelfde manier reageert als een mens. Het gedrag van de robot dient voorspelbaar
te zijn en de robot moet op een logische manier reageren tijdens de interactie met de mens,
stellen de onderzoekers. Indien een robot foutief gedrag vertoont, dan daalt de betrouwbaarheid
en voorspelbaarheid van de robot bij mensen (Salem, Lakatos, Amirabdollahian, &
Dautenhahn, 2015). Echter, merken Salem et al. (2015) hierbij op dat ondanks deze daling, de
robot door de gemaakte fouten wel als menselijker wordt waargenomen.
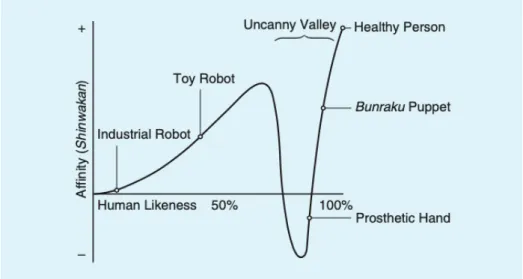
Daarnaast zorgt een robot die te veel op een mens lijkt, zeer humanoïde robots, voor een
averechts effect dat de griezelvallei wordt genoemd (Mori et al., 2012). Turney (2015) beschrijft
dit effect als volgt: “. . . mensen lijken zich ongemakkelijk te voelen tegenover robots die er min
betekent dat hoe menselijker de robot eruitziet, hoe meer affiniteit, tot een bepaald punt bereikt
wordt (Mori et al., 2012). Als dit punt bereikt is, waarbij de robot ongeveer 80 tot 85 procent
gelijkenissen vertoont met de mens, neemt de affiniteit sterk af (Mori et al., 2012). Dit komt
doordat de mens zowel een robot als een mens herkent in de humanoïde robot, waardoor er een
intern conflict ontstaat (Mori et al., 2012). Dit effect wordt weergegeven in figuur 3.
Figuur 3: Het griezelvallei effect (Mori, MacDorman & Kageki, 2012, p. 99)
Verder bestaat er ook een ander effect bij de relatie tussen een mens en een robot. Darling
schreef in 2012 dat uit psychologisch onderzoek blijkt dat mensen zich emotioneel gaan hechten
aan objecten, dit wordt het verzorgereffect genoemd. Dit effect blijkt nog sterker te zijn ten
aanzien van sociale robots, omwille van 3 factoren: lichamelijkheid, waarneembare autonome
beweging en sociaal gedrag (Darling, 2012). Door deze factoren vertonen mensen ander gedrag
tegenover sociale robots in vergelijking met andere objecten waarbij het verzorger effect minder
sterk aanwezig is (Darling, 2012). Robots delen onze fysieke ruimte, daarom is deze hechting
dan ook te verwachten, zeker als ze menselijke capaciteiten bezitten (Leite et al., 2013).
Dergelijk verzorger effect kan ook negatief zijn als hierdoor bijvoorbeeld menselijke interactie
2.3 Ethiek en rechten
2.3.1 Ethiek en moraliteit
Zoals het voorgaande reeds aantoonde, blijkt ethiek al snel een belangrijk rol te spelen. Gabriels
(2019) definieert ethiek dan ook als volgt: “Ethiek verwijst naar een specifieke filosofische
discipline die een systematische en kritische reflectie op moraliteit beoogt” (p. 25). Ethiek is
van belang op niveau van de maatschappij, de technologie, de maker en de gebruiker (Gabriels,
2019). Ethiek kan dan ook zowel als moeilijk, en als gemakkelijk gezien worden (Nath & Sahu,
2017). Enerzijds is het gemakkelijk omdat men dagelijks ethisch handelt, anderzijds is het
moeilijk omdat de achterliggende criteria bij dergelijke ethische handelingen niet simpel
achterhaald en gecodeerd kunnen worden (Nath & Sahu, 2017). Bovendien is ethiek niet enkel
achteraf van belang, maar ook voor en tijdens het ontwikkelingsproces van de technologie
(Gabriels, 2019). De technologie is dan het resultaat van al dan niet morele keuzes (Gabriels,
2019).
Daarnaast dient er een onderscheid gemaakt te worden tussen ethiek en moraliteit, deze zijn
immers geen synoniemen, stelt Gabriels (2019). In haar werk beschrijft de auteur moraliteit als
een individuele blik op normen en gewoontes, die varieert per specifieke culturele context.
Bovendien kunnen mensen reflecteren over hun eigen gedrag, normen, waarden, etc. omdat ze
morele wezens zijn (Gabriels, 2019). Een morele daad is dan ook een daad die tegenstrijdig is
met hetgeen waarnaar men verlangt en de wet niet overtreedt (Beavers, 2009). Indien iemand
een handeling uitvoert die niet in strijd is met de wet en dit gebeurde uit eigen wil, dan is die
persoon minder moreel in vergelijking met iemand die dezelfde handeling doet maar dit
eigenlijk niet wou doen (Beavers, 2009).
Tenslotte zijn er volgens Gabriels (2019) binnen de moraliteit enkele belangrijke aspecten.
Twee daarvan zijn morele chaos en morele ontkoppeling. Het eerste houdt in dat mensen niet
altijd handelen naar hun woorden (Gabriels, 2019). Het tweede is een mechanisme waarbij
gedrag dat niet aansluit bij de morele waarden en normen, gerechtvaardigd wordt (Gabriels,
2019).
2.3.2 Rechten en rechtspersoonlijkheid
Verder vormen naast ethiek ook rechten en rechtspersoonlijkheid een belangrijk onderdeel
binnen deze literatuurstudie. Een duidelijke afbakening van het begrip ‘recht’ zou mede helpen
om criteria te vormen om af te toetsen wat er nu precies onder het begrip rechtspersoon valt
(Calverley, 2011). Een belangrijke illustratie hiervan is de discussie of machines al dan niet als
rechtspersoon kunnen worden gezien (Calverley, 2011). Moore (2014) definieerde het recht als
een sociale constructie die ervoor zorgt dat burgers weten wat ze kunnen, wel mogen en niet
mogen doen, maar ook tot wat ze gerechtigd zijn. Daarnaast omvat het ook alle instituties die
zowel deze wetten maken als afdwingen (Morse, 2004). Echter, Calverley schreef in 2011 dat
bovenstaande definitie bedrieglijk is. Hij stelde dat het rechtssysteem kan gezien worden als
een formele opeenstapeling van praktische oordelen, een opslagplaats van kennis. Daarnaast
kan volgens Marx en Tiefensee (2015) ‘recht’ niet losgekoppeld worden van ‘plicht’. Ze
beschrijven dit verband als volgt: “A has a right to X if and only if B has a duty towards A to
act in a way that does not hinder A from attaining X or that promotes A ' s attaining X.” (p.
71). De auteurs merken wel op dat het omgekeerde niet geldt.
Bovendien dient men om van rechten te kunnen genieten, rechtspersoonlijkheid te bezitten
(Smith, 1928). Rechtspersoonlijkheid impliceert echter ook dat men plichten heeft (Solaiman,
2017). Elke entiteit, ongeacht of men een mens is of niet, die de capaciteiten heeft om rechten
en plichten te bezitten, is dan ook een rechtspersoon, stelt Solaiman (2017). Zowel natuurlijke
personen, als rechtspersonen bezitten rechtspersoonlijkheid (Westenbroek, 2016). Een
rechtspersoon is een entiteit gecreëerd door de wetgever en is tevens een erkende rechtsvorm
(Westenbroek, 2016). Op die manier kan men zelfstandig in het maatschappelijk verkeer
optreden, eigen bezittingen hebben, in rechte optreden, verplichtingen aangaan en rechten
hebben (Westenbroek, 2016).
2.3.3 Aansprakelijkheid
Loh schreef in 2019 dat aansprakelijkheid drie zaken omvat. Ten eerste houdt aansprakelijkheid
in dat je verantwoordelijk bent voor iets. Ten tweede is het een normatief concept, dus niet
enkel descriptief en causaal. Ten derde ziet men de persoon in kwestie als een autonoom
persoon die in staat is verantwoordelijkheid op te nemen en de capaciteiten bezit om te kunnen
oordelen en te reflecteren.
Daarnaast stelt Loh dat als het over het subject gaat, er een onderscheid moet gemaakt worden
tussen een individu en een collectief. Indien het subject een individu is, dan zijn er drie vormen
van aansprakelijkheid: enige, persoonlijke en eigen (Loh, 2019). In het andere geval
onderscheidt men gedeeltelijke, volledige of geen aansprakelijkheid (Loh, 2019). Een andere
vorm van aansprakelijkheid, namelijk de ouderlijke aansprakelijkheid, is van toepassing indien
het gaat om minderjarigen (Subramanian, 2017). Dit houdt in dat ouders of voogden
aansprakelijk kunnen worden gesteld, indien de minderjarige in kwestie opzettelijk schade heeft
teweeggebracht aan eigendommen of personen heeft verwond (Subramanian, 2017).
Verder zijn er verschillende autoriteiten die instaan voor de afdwinging van de gevolgen van
aansprakelijkheid. De rechtbank en de rechter zijn voorbeelden van externe autoriteiten (Loh,
2019). Autoriteiten kunnen ook privaat of publiek zijn, deze worden onder andere door de
context en normatieve criteria onderscheiden van elkaar (Loh, 2019). Loh (2019) omschrijft
deze normatieve criteria als voorwaarden waaraan een subject moet voldoen om aansprakelijk
te zijn. Dit kunnen waarden, principes, regels, wetten, etc. zijn.
Tenslotte bestaat er binnen de aansprakelijkheid het principe van de alternatieve
mogelijkheden. Dat principe stelt dat een persoon enkel moreel aansprakelijk is voor zijn/haar
handelingen indien hij/zij op een andere manier had kunnen handelen (Frankfurt, 1969).
Frankfurt weerlegde dit principe in 1969 omdat volgens hem een persoon ook moreel
aansprakelijk kan zijn voor zijn/haar daden, indien hij/zij geen andere keuze had. Een persoon
die een handeling verricht, waarbij hij/zij geen andere keuze had, verricht die handeling immers
niet noodzakelijk omwille van het feit dat er geen alternatieve mogelijkheid was (Frankfurt,
geen andere keuze had. Volgens de onderzoeker moet het principe van de alternatieve
mogelijkheden dan ook vervangen worden door het volgende: een persoon is niet moreel
aansprakelijk voor zijn/haar daden, indien die persoon iets gedaan heeft enkel en alleen omwille
van het feit dat hij/zij niet anders kon.
2.3.4 Privacy
Naast aansprakelijkheid, is ook privacy een belangrijk ethisch aspect. Zo zijn er wereldwijd
honderden wetten die privacy reguleren (Solove, 2008). Privacy is een probleem dat over de
hele wereld van groot belang is (Solove, 2008).
Bovendien steeg de bezorgdheid voor privacy door de ontwikkeling van nieuwe
technologieën (Solove, 2008). Vooral de opkomst van nieuwe informatietechnologieën, zoals
de computer, zorgde ervoor dat privacy wereldwijd uitgroeide tot een probleem (Solove, 2008).
Het inbouwen van waarborgen voor privacy is dan ook van groot belang bij het gebruik van
data bij revolutionaire technologieën, zoals bijvoorbeeld cloud computing, blockchain en big
data (AIR, 2018). Ook andere technologieën zoals persoonlijke of huishoudelijke robots weten
veel informatie over het privéleven van een persoon (Pagallo, 2013). Bij de regulering van
privacy problemen, dient dan ook extra aandacht te zijn voor de mate van autonomie bij
dergelijke robots (Pagallo, 2013). Echter, niet iedereen maakt zich zorgen en sommigen
beweren dat ondanks wat mensen zeggen, hun acties aantonen dat ze eigenlijk helemaal geen
privacy wensen (Solove, 2008).
Uiteindelijk is en blijft privacy een grondrecht dat essentieel is voor vrijheid, democratie,
psychologisch welzijn, individualiteit en creativiteit (Solove, 2008). Tussen de Europese Unie
en de Verenigde Staten is er wel een groot verschil op vlak van privacy regulering (AIR, 2018).
In de Europese Unie is dit een grondrecht, maar in de Verenigde Staten staat het recht op privacy
als consumentenrecht aangeschreven (AIR, 2018).
2.4 Sociale robots, ethiek en rechten
Ook de laatste technologische evolutie, namelijk de digitale revolutie, zorgde voor wijzigingen
in de maatschappij (Russo, 2018). Mensen voeren onder andere steeds vaker met meerdere
robots tegelijk interactie (Fraune et al., 2020). Er zijn hierbij verschillende vormen van
interactie, zoals sociale en functionele (Fraune et al., 2020). In het verloop van deze studie zal
de nadruk liggen op sociale robots en dus op sociale interactie. Robots die ontworpen zijn met
het oog op sociaal contact bevinden zich immers steeds frequenter in het leven van de mens,
waardoor een vraag ontstaat naar een beleid (Darling, 2012). Dit komt onder andere gezien het
feit dat de mens geneigd is menselijke eigenschappen te projecteren op andere objecten om
deze menselijker te doen lijken (Darling, 2012). Dat laatste wordt antropomorfisme genoemd
en betrof oorspronkelijk dieren, maar nu komen dergelijke tendensen ook bij robots voor
(Darling, 2012).
Om de voordelen van robots en artificiële intelligentie optimaal te benutten en risico’s te
beperken, is juridische tussenkomst noodzakelijk (De Bruyne, 2019). Alle nieuwe
technologieën moeten immers veilig zijn (Lin, 2012) en men moet er dus ook op kunnen
vertrouwen dat deze robots op een ethische wijze zullen handelen (Nath & Sahu, 2017).
Bovendien kan een machine wel geprogrammeerd zijn om op een bepaalde wijze te handelen,
maar kan het voorvallen dat in de praktijk de gestelde handelingen niet altijd het gewenste
resultaat opleveren (Sawyer, 2007).
Isaac Asimov had in 1942 een set van regels opgesteld voor robots (Lutz & Tamò, 2015). Ten
eerste mag een robot een mens niet verwonden of, door niets te doen, een mens schade
toebrengen (Lutz & Tamò, 2015). Ten tweede moet een robot de bevelen opvolgen die de mens
hem heeft gegeven, behalve wanneer de bevelen in strijd zijn met de eerste regel (Lutz & Tamò,
2015). Ten derde moet een robot zijn eigen bestaan beschermen, zolang deze bescherming niet
in strijd is met de eerste of de tweede regel (Lutz & Tamò, 2015).
In het vervolg van deze sectie zullen de volgende zaken aan bod komen met betrekking tot
sociale robots en ethiek:
- Morele agenten
- Wetgeving bij sociale robots
- De vergelijking van sociale robots met dieren
- Sociale robots en ouderdom
2.4.1 Morele agenten en ethiek
Ten eerste zijn er binnen de artificiële intelligentie twee soorten morele agenten: impliciet
morele agenten en expliciet morele agenten (Nath & Sahu, 2017). Nath en Sahu (2017)
beschrijven een impliciet moreel agent als een agent die zich ethisch gedraagt omdat het zo
geprogrammeerd is geweest. Deze agent wordt dus beperkt door de ethische principes van de
programmeur (Nath & Sahu, 2017). Een expliciet moreel agent is volgens deze onderzoekers
in staat om, aan de hand van ethische principes, zelf ethische dilemma’s te overwinnen.
Expliciete morele agenten zouden het doel moeten zijn bij de creatie van robots (Anderson &
Anderson, 2007).
Wang en Siau (2019) maken in hun werk een gelijkaardige onderverdeling voor ethische
agenten, namelijk ethische producenten en ethische ontvangers. Een ethisch producent gaat zelf
iets uitvoeren, terwijl een ethisch ontvanger gecommandeerd wordt om iets te doen (Wang &
Siau, 2019). Een voorbeeld van dergelijk ethisch producent is een robot die als assistent
fungeert tijdens een operatie (Wang & Siau, 2019). Een militaire robot die gecommandeerd kan
worden om een aanslag te plegen, is dan een voorbeeld van een ethisch ontvanger (Wang &
Siau, 2019).
Bovendien kunnen criminele daden enkel gepleegd worden door morele agenten (Asaro, 2007).
Dit komt omdat morele agenten beschikken over vrije wil en bewustzijn, enkel dan kan men
zijn. Het enige dat nodig is, is dat de robot correct moreel gedrag vertoont en dit aan de hand
van de gevolgde ethische principes kan gaan rechtvaardigen (Anderson & Anderson, 2007).
Daarnaast is het zo dat indien een robot iets foutief zou uitvoeren, in dit geval dus onethisch
zou handelen, dan zal dit gezien worden als een programmeerfout, terwijl mensen geen
programmeerfouten kunnen bevatten (Nath & Sahu, 2017). Net om die reden schreef Gunkel
reeds in 2012 dat er moet bepaald worden of een robot al dan niet aansprakelijk kan gesteld
worden en verantwoordelijk kan gehouden worden voor een handeling, maar ook vanaf welk
punt dit dan moet gebeuren. De robot bestraffen voor dergelijke foutieve handeling blijft dan
ook een probleem, aangezien een robot wel fysiek aanwezig is, maar het is niet zeker of een tik
geven zou gelden als straf voor de robot en hoe ethisch dit zou zijn (Asaro, 2007).
Verder concludeerden Nath en Sahu in hun onderzoek in 2017 dat een artificieel moreel agent
geen moreel agent kan zijn, net omdat de reden waarom men moreel is enkel toepasbaar is op
subjectieve wezens, niet op een artificieel agent. Ook ethiek bij machines werd om dezelfde
reden weerlegd door hen. Opdat er sprake zou zijn van een ethisch wezen, is de aanwezigheid
van subjectieve gevoelens noodzakelijk, terwijl artificiële morele agenten die niet bezitten
(Nath & Sahu, 2017). Het is dan ook zo dat een moreel agent zijn de mogelijkheid tot het
vertonen van immoreel gedrag vereist (Beavers, 2009). Daardoor is het volgens Beavers (2009)
wenselijk dat robots moreel gedrag enkel simuleren in plaats van echte morele agenten te zijn.
Desondanks schreef Loh in 2019 dat indien er op een dag artificiële agenten zijn die functionele
verantwoordelijkheid toegekend krijgen, hun relatie met hun menselijke ‘ouders’ vergelijkbaar
zou zijn met de relatie van bijna meerderjarige kinderen met hun ouders. Ook Asaro (2007)
maakt de vergelijking van minderjarigen en robots. Minderjarigen worden namelijk als
quasi-personen gezien en beschikken dus niet over de volledige rechten die volwassenen hebben
(Asaro, 2007). Dit betekent dat in het geval van een fout die de robot zou veroorzaken, de
menselijke ‘ouders’ van de robot altijd, al dan niet gedeeltelijk, aansprakelijk zullen zijn voor
de daden van de robot (Loh, 2019). Een quasi-persoon beschikt namelijk over verminderde
aansprakelijkheid (Asaro, 2007).
Ten slotte dient een sociale robot onder andere morele competenties te hebben, opdat deze
geschikt zou zijn voor sociale interactie met mensen (Malle & Scheutz, 2014). Enkele
voorbeelden van deze competenties zijn normen, morele communicatie en morele
besluitvorming (Malle & Scheutz, 2014). Mensen bezitten deze morele competenties niet van
bij de geboorte, maar leren dit vanaf de kindertijd (Malle & Scheutz, 2014). Robots zullen, net
zoals kinderen, deze competenties moeten leren, stellen Malle en Scheutz (2014). De
onderzoekers wijzen er echter wel op dat het nog onzeker is hoe goed robots dergelijke
competenties kunnen leren. Echter, het gebruik van sociale signalen zou een robot in staat
stellen om op een snelle manier bij te leren (de Greeff & Belpaeme, 2015). Dit wordt ook wel
sociaal leren genoemd (de Greeff & Belpaeme, 2015).
2.4.2 Robotethiek en wetgeving
Naast moraliteit, kan er ook verder worden ingegaan op robotethiek en de wetgeving daarrond.
Robotethiek is namelijk een relatief jonge filosofische discipline (Loh, 2019). Zoals reeds in
sectie 2.2.1 werd aangehaald, zijn alle robots machines. Machine ethiek focust zich op de
moraliteit van machines (Bendel, 2013). Robotethiek is dan ook een subcategorie van de
machine ethiek (Loh, 2019). De Artificiële Intelligentie Impact Assessment (AIIA) bevat een
plan van acht stappen, waarmee bedrijven inzicht kunnen verwerven over welke juridische en
ethische normen van belang zijn bij het creëren van AI-systemen en slimme robots (AIR, 2018).
Dit stappenplan wordt voorafgegaan door de Gedragscode Artificiële Intelligentie (GAI), een
twintigtal punten waaraan de ontwikkeling, maar ook het gebruik, van de kunstmatige
intelligentie moet voldoen (AIR, 2018). De GAI vormt dus de basis voor het raamwerk onder
AIIA. Ook bij de implementatie van AI kan de AIIA helpen bij het maken van beslissingen en
keuzes door de motieven die aan de basis liggen, te verhelderen (AIR, 2018). AIIA is nog niet
verplicht, maar kan wel ten goede komen bij rechtszaken over onder andere de
aansprakelijkheid van slimme robots of de verantwoordelijke bij bepaalde gebeurtenissen (AIR,
voornamelijk verder op veiligheidsvereisten van industriële, zorg- en medische robots (BSI,
2016). De standaard is voornamelijk bedoeld voor ontwerpers en managers die betrokken zijn
bij het ontwerp van robots, maar ook de gebruikers van het eindproduct zullen hier baat bij
hebben indien de richtlijnen effectief werden nageleefd (BSI, 2016).
Bovendien is in de medische en educatieve sector het potentieel van sociale robots hoog en zijn
dit tevens de sectoren waar ethiek van groot belang is (Senft, Lemaignan, Baxter, Bartlett, &
Belpaeme, 2019). Een sociale robot wordt bovendien beter geaccepteerd als teamlid, dan een
menselijke collega, wat leidt tot een stijging van de productiviteit (Vänni & Korpela, 2015).
Ook Senft et al. (2019) schrijven in hun werk dat de menselijke productiviteit zou stijgen. Dit
zou volgens de onderzoekers omwille van de autonomie van sociale robots zijn, maar ook
doordat fysische en cognitieve taken zouden kunnen overgelaten worden aan de robot. Daarbij
benadrukken de auteurs dat de sectoren waar sociale robots veel potentieel hebben, ook het
meest risico lopen op slechte functionerende autonome systemen. Dat laatste wordt versterkt
door ethische bezwaren (Senft et al., 2019). Mensen dienen immers deze autonome systemen
te vertrouwen (Salem, Lakatos, Amirabdollahian, & Dautenhahn, 2015). Dit vertrouwen houdt
in dat mensen de informatie die de sociale robot verschaft aanvaarden en de instructies van de
robot volgen (Salem et al., 2015). Er is geen eenduidige definitie van vertrouwen, maar
betrouwbaarheid en voorspelbaarheid zijn begrippen die vaak voorkomen bij de invulling van
het begrip. Daarom is het van belang dat robots via hun sociale handelingen een goede indruk
maken bij de mens, zodat mensen hen als betrouwbaar en veilig zien (Salem et al., 2015). Indien
dat niet het geval is, zouden mensen bijvoorbeeld de aanbevelingen van de robot weigeren op
te volgen (Salem et al., 2015). Echter, bij te veel vertrouwen in de sociale robot kunnen mensen
storingen of foutieve handelingen negeren, wat tevens ongewenst is (Salem et al., 2015). De
juiste balans tussen autonomie van een sociale robot en menselijke controle is cruciaal op
ethisch vlak, maar tevens een van de grootste uitdagingen (Senft et al., 2019). Salem et al.
(2015) stellen in hun onderzoek dan ook de vraag of opleidingen en licenties niet verplicht
zouden moeten zijn, aangezien de doelgroep van sociale robots doorgaans niet-deskundige
gebruikers zijn.
Ook schreef Asaro in 2007 dat de wettelijke verantwoordelijkheid voor handelingen van de
robot bij de persoon ligt die de robot toestemming geeft om namens hem te handelen, maar dit
inschatten of de gevolgen van de actie schade zullen veroorzaken of niet (Gelin, 2015). Indien
deze inschatting zou overgelaten worden aan de robot, dan moet de robot de
voorgeprogrammeerde ethische principes van de fabrikant volgen. Bijgevolg moet de gebruiker
zich aanpassen aan de ethiek van een ander (Gelin, 2015). Bijleren over de robot is
noodzakelijk, opdat de mens de robot zou kunnen besturen en niet omgekeerd (Gelin, 2015).
Echter, op vlak van aansprakelijkheid en verantwoordelijkheid bij schade toegebracht
door kunstmatige intelligente applicaties en robots, ontbreekt er een wettelijke regelgeving.
Daarom kan er gekeken worden naar Boek 6 Titel 3 Burgerlijk Wetboek inzake Onrechtmatige
daad (AIR, 2018). Hierbij is Artikel 6:162 BW van belang die zou kunnen toegepast worden in
het geval er schade is veroorzaakt door een robot en luidt als volgt:
“1. Hij die jegens een ander een onrechtmatige daad pleegt, welke hem kan worden
toegerekend, is verplicht de schade die de ander dientengevolge lijdt, te vergoeden.
2. Als onrechtmatige daad worden aangemerkt een inbreuk op een recht en een doen of
nalaten in strijd met een wettelijke plicht of met hetgeen volgens ongeschreven recht in
het maatschappelijk verkeer betaamt, een en ander behoudens de aanwezigheid van een
rechtvaardigingsgrond.
3. Een onrechtmatige daad kan aan de dader worden toegerekend, indien zij te wijten
is aan zijn schuld of aan een oorzaak.” (AIR, 2018).
Verder heeft een wetgeving ook nadelen. Zo kan het onterecht de fabrikant van de robot
vrijwaren van eventuele schuld voor bijvoorbeeld een foutief ontwerp of een programmeerfout
(Asaro, 2007). Daarnaast kunnen de eigenaars van robots door dergelijke wetgeving afgeschrikt
worden doordat het hen een last oplegt, waardoor de wenselijkheid voor de adoptie van robots
vermindert (Asaro, 2007). Darling schreef in 2012 dan ook dat een wetgeving voor sociale
robots pas wenselijk is als de meerderheid van de maatschappij hierom vraagt. Een wetgeving
toont namelijk aan welke normen en waarden mensen wensen af te dwingen binnen een
maatschappij (Luhmann & Kastner, 2004).
reeds gedefinieerd. Een toevoeging aan deze definitie is dat de robot ook op realistische wijze
moet kunnen reageren op mishandeling (Darling, 2012). Naast het definiëren van sociale robots,
zou er ook een afbakening moeten gebeuren van de term ‘mishandeling’ (Darling, 2012). Dit
vereist echter nog verder onderzoek in de toekomst (Darling, 2012).
2.4.3 Zijn sociale robots dieren?
Indien robots ethische agenten zouden worden, dan dient er nagedacht te worden over het al
dan niet toe verlenen van rechten aan robots, morele verplichtingen van de mens tegenover deze
robots, vrijheid van de robots, etc. (Nath & Sahu, 2017). Rechten voor sociale robots kunnen
op allerlei manieren tot stand komen. Saoedi-Arabië gaf de robot Sophia bijvoorbeeld
staatsburgerschap (De Bruyne, 2019). Wie staatsburgerschap bezit geniet van bepaalde rechten
en komt zijn/haar plichten na (Marx & Tiefensee, 2020).
Echter, Marx en Tiefensee (2015) vinden dat huisdieren geen staatsburgerschap dienen te
krijgen. Hierdoor zouden de morele kwaliteiten van de dieren verkeerd ingeschat worden en
ontstaat er het risico dat ze onrechtvaardig behandeld zouden worden (Marx & Tiefensee,
2020). Desondanks, worden dieren wel reeds door de wet beschermd. Zo zouden ook sociale
robots beschermd kunnen worden (Darling, 2012).
Deze vergelijking van sociale robots met dieren is iets dat algemeen voorkomt (Johnson
& Verdicchio, 2018). Mensen hebben bovendien de neiging om robots te zien als dieren (Marx
& Tiefensee, 2020). Dit wordt ook wel ‘zoomorfisme’ genoemd, waarbij dierlijke kenmerken
worden toegeschreven aan objecten en mensen (Sandry, 2015). Zelfs robots die niet ontworpen
zijn om er dierlijk uit te zien, veroorzaken het effect van ‘zoomorfisme’ bij de mens (Sandry,
2015).
Volgens Darling (2012) zijn de redenen waarom men robots zou beschermen niet volledig
hetzelfde als bij dieren, maar er zijn wel raakpunten op psychologisch en filosofisch vlak. Een
filosofisch argument is bijvoorbeeld de morele verplichting om leed en pijn bij levende wezens
te voorkomen (Darling, 2012). Daarnaast is het beschermen van dieren ook een soort van
bescherming van onze eigen emoties (Darling, 2012). Er zijn ook andere gelijkenissen tussen
en worden ze zelfs als minderwaardig gezien, doordat ze onder andere geen of bijna geen
waarde en morele status hebben (Johnson & Verdicchio, 2018). Onafhankelijk van welke
argumenten gehanteerd worden, kan de regulering met betrekking tot het beschermen van
robots op dezelfde manier gestructureerd worden als de wetgeving tegen dierenmishandeling,
stelt Darling (2012).
Echter, Johnson en Verdicchio (2018) beweren in hun onderzoek dat de vergelijking van robots
met dieren misleidend is, omdat er nog geen zekerheid is over hoe sociale robots dienen
behandeld te worden. Volgens hen mag het feit dat dieren levende organismen zijn en robots
dit niet zijn, niet uit het oog verloren worden. Als het gaat over de morele status, wettelijke
aansprakelijkheid en de impact op hoe mensen andere mensen behandelen, is de vergelijking
van robots met dieren dus foutief volgens Johnson en Verdicchio (2018).
Tenslotte zou volgens Kant de manier waarop mensen dieren behandelen, een impact hebben
op hoe mensen elkaar behandelen (Johnson & Verdicchio, 2018). Een persoon zijn omgang met
dieren zegt namelijk iets over die persoon zijn zedelijkheid (Johnson & Verdicchio, 2018).
Echter, Johnson en Verdicchio (2018) schrijven dat er geen bewijs is dat de manier waarop men
dieren behandelt een invloed zou hebben op hoe men mensen gaat behandelen. Volgens de
onderzoekers wordt deze filosofie dan ook onterecht toegepast op robots. Indien dergelijk effect
toch zou bestaan, dan zijn robots niet te vergelijken met dieren (Johnson & Verdicchio, 2018).
Dieren lijden namelijk bij mishandeling, terwijl dit niet het geval is bij robots aangezien deze
niet gevoelig zijn (Johnson & Verdicchio, 2018). In staat zijn om te lijden, is een belangrijk
ethisch en moreel argument (Bendel, 2013). Johnson en Verdicchio (2018) stellen het dan ook
in vraag waarom men robots gevoelig zou maken, aangezien deze vooral ontwikkeld worden
om mensen te helpen of te begeleiden, bijvoorbeeld bij ouderen.
maatschappij en de opkomst van sociale robots dat ouderen steeds vaker begeleid worden door
dergelijke robots (Gelin, 2015). Een toepassing van sociale assistentie robots bij residenties van
ouderen, werd reeds besproken in sectie 2.2.4. Sociale robots kunnen echter ook ingezet worden
bij ouderen thuis, waarmee eenzaamheid en de nood aan begeleiding gedeeltelijk verholpen
worden (Gelin, 2015). Gelin schreef in 2015 dat het oplossen van deze problemen, geen nieuwe
problemen mogen veroorzaken, zoals op ethisch vlak.
Een eerste bedenking die Gelin (2015) aanhaalt, is of het al dan niet ethisch is om ouderen
alleen te laten met een robot. De onderzoeker stelt dat zolang het niet haalbaar is voor
familieleden om voldoende te zorgen voor de ouderen, een sociale robot een goede oplossing
is om hen autonomie en veiligheid te bezorgen. Een tweede en zeer cruciaal ethisch aspect is
dat er sprake is van bedrog, indien de fabrikant beweert dat de robot emoties heeft (Gelin, 2015).
De ouderen dienen afstand te houden van een robot op emotioneel vlak (Gelin, 2015). Mensen
herkennen mensachtige verschijningen en mensachtige stemmen (Ishiguro, 2015). Hierdoor is
het van belang om de sociale robot voldoende te differentiëren van een mens, zodat de
emotionele afstand bewaard kan blijven (Gelin, 2015). Daarnaast kan de gebruiker ook bijleren
over de robot, zodat de gebruiker zijn/haar gevoelens naar de robot toe kan relativeren, stelt
Gelin (2015).
Opdat sociale robots ethisch zouden zijn, moeten ouderen deze interactie ook willen accepteren
(Frennert & Östlund, 2014). Enkele factoren die een rol spelen bij de acceptatie van een sociale
robot door ouderen, zijn onder andere de acceptatie door anderen, juridische en sociaal-ethische
factoren (Frennert & Östlund, 2014). Ook menselijke en/of dierlijke kenmerken, die
respectievelijk zorgen voor antropomorfisme en/of ‘zoomorfisme’, dragen bij tot de acceptatie
van sociale robots (Sandry, 2015). Bovendien hebben sociale assistentie robots met dierlijke
kenmerken beduidend gunstigere resultaten bij de preventie van mentale problemen en het
verbeteren van de algehele conditie van ouderen met neurodegeneratieve aandoeningen (Barata,
2019).
Tenslotte stelde Gelin (2015) in zijn werk de vraag wie aansprakelijk is, indien een robot
iemand schade of leed bezorgt. Terwijl Asaro in 2007 schreef dat de verantwoordelijkheid voor
hem te handelen, is ook de fabrikant medeverantwoordelijk volgens Gelin (2015). De fabrikant
moet er namelijk voor zorgen dat de robot correct werkt, het is en blijft immers een toestel
(Gelin, 2015). De AI-ontwikkelaar kan dan ook in sommige gevallen risicoaansprakelijk zijn,
indien deze op de hoogte was dat de software schade zou kunnen veroorzaken, maar toch op de
markt heeft gebracht (AIR, 2018).
2.5 Onderzoek tot op heden
2.5.1 SLR-protocol
Er is veel onderzoek gaande omtrent het creëren van artificiële systemen die door mensen
als sociale entiteiten of agenten zouden gezien worden (Jones, Lawson, & Mills, 2008).
Sociale robots zijn dan ook het type robots waarbij er hoge verwachtingen zijn dat ze over
enkele jaren in het alledaagse leven van de mens aanwezig zullen zijn (Jones et al., 2008).
Zoals reeds bleek uit de literatuurstudie tot nu toe, ontstaan er hierdoor vaak juridische en
ethische kwesties. Hiervan zijn sommige reeds grondig onderzocht, terwijl andere nog
maar net in de onderzoekswereld aan aandacht winnen. Deze kwesties zullen nader
besproken worden op basis van reeds verrichte studies. Onderstaande tabel geeft alvast
het SLR-protocol weer dat binnen dit onderzoek werd toegepast.
Tabel 2: SLR-protocol
Protocol elementen
Binnen dit onderzoek
Onderzoeksvraag
Wat is de stand van huidig onderzoek naar ethiek en rechten
van sociale robots?
Doorzochte bronnen
Web of Science, Google Scholar, Scopus
Zoektermen
Social robot, ethics, morality, law, responsibility, animals,
humanoid robots, ethical, autism, elderly people, SAR, HRI
Zoekstrategie
Zoektermen die voorkwamen in de titel, kernwoorden of
abstract. Geen beperkingen op vlak van onderwerp of
publicatiedatum.
Inclusiecriteria
Geschreven in het Nederlands of Engels
Exclusiecriteria
Artikels zonder volledige toegang, artikels in een andere taal
dan Engels of Nederlands
Kwaliteitscriteria
Gepubliceerd in peer-reviewed tijdschrift of conferentie
Om huidige studies naar ethiek en rechten van sociale robots te verzamelen, werd er
gebruik gemaakt van verschillende databases. Deze waren Web of Science, Google
Scholar en Scopus. De zoekopdracht omvatte combinaties van de volgende kernwoorden:
“social robot”, “ethics”, “morality”, “law”, “responsibility”, “liability”, “animals”,
“humanoid robots”, “ethical”, “autism”, “elderly people”, “HRI” en “SAR”. Indien de
zoektermen voorkwamen in de titel, kernwoorden of abstract, werd de abstract gelezen
om de bruikbaarheid van de bron na te gaan. Er waren hierbij geen beperkingen op vlak
reviewed tijdschriften of conferenties, in het Nederlands of Engels, werden geselecteerd
uit de zoekresultaten.
Tabel 3: Overzicht bestaande studies