EFFECT VAN SOCIALE ROBOTS OP
KINDEREN IN HET ONDERWIJS: EEN
SYSTEMATISCHE LITERATUURSTUDIE
Aantal woorden: <32909>Tugay Poyraz 01402307 & Adeel Hakimi 01509688
Promotor: Prof. Dr. Amy Van Looy
Masterproef voorgedragen tot het bekomen van de graad van:
Master in de handelswetenschappen: Management en Informatica
VERTROUWELIJKHEIDSCLAUSULE/ CONFIDENTIALITY AGREEMENT
PERMISSION
Ondergetekenden verklaren dat de inhoud van deze masterproef mag geraadpleegd en/of gereproduceerd worden, mits bronvermelding.
We declare that the content of this Master’s Dissertation may be consulted and/or reproduced, provided that the source is referenced.
Naam studenten/name students : Tugay Poyraz en Adeel Hakimi
ii
Algemeen Voorwoord
Voor u ligt het sluitstuk van onze opleiding Handelswetenschappen met de afstudeerrichting Master in Management en Informatica met name ‘Effect van sociale robots op kinderen in het onderwijs: een systematische literatuurstudie’. In deze masterproef wordt het concept sociale robots gelinkt aan het onderwijs en worden de effecten nagegaan van de sociale robots op de kinderen in het onderwijs. Dit werk is bedoeld om het onderzoek naar de implementatie van de sociale robot in het onderwijs in kaart te brengen en de evolutie van dit weer te geven. De bedoeling is dat het nodige beeld wordt gecreëerd voor beleidsmakers in het onderwijs voor de manier waarop ze de sociale robot kunnen implementeren in het onderwijs. Wij zijn in het academiejaar 2019-2020 bezig geweest met het onderzoek en het schrijven van deze masterproef.
Allereerst willen we voor onszelf onze trots uiten dat wij deze proefschrift met de nodige motivatie en geduld hebben kunnen schrijven. Bij deze willen wij graag onze promotor Prof. Amy van Looy bedanken voor de fijne begeleiding en haar ondersteuning tijdens dit traject. Bovendien geloven wij, dat zonder haar lessen over technologie en management, onze passie voor technologie en het beheren van technologie zichzelf nooit ontwikkeld zou hebben zoals het nu is. Verder bedanken we onze ouders voor de geweldige steun. Bedankt voor alle inspanningen en de motiverende woorden. Hartelijk dank om altijd naast ons te staan. Hartelijk dank om altijd in ons te geloven. Hartelijk dank voor de mogelijkheid om te kunnen gestudeerd hebben aan deze geweldige universiteit. Hartelijk dank om ons de mogelijkheden te bieden die jullie zelf niet hadden, maar met alle moed aan ons hebben geboden. Tot slot ook een dank aan onze geweldige collega-studenten en de Universiteit Gent voor de geweldige jaren in deze faculteit. Zonder de medewerking van hen hadden wij dit onderzoek nooit kunnen voltooien.
Ook nog een woord over onze vriend van de laatste maanden, de COVID-19. De coronapandemie heeft met zekerheid een aandeel in dit proefschrift. De effecten van de coronacrisis die wij samen met de wereld hebben gevoeld. Allereerst gaan onze gedachten uit aan de overleden van deze ziekte en we wensen veel beterschap toe aan de mensen die er nog steeds aan lijden. De motivatie werd dagelijks onder druk gezet tijdens de quarantainedagen die we door deze ziekte thuis hadden moeten doorbrengen. De manier waarop we ons onderzoek zouden organiseren, namelijk een experimenteel onderzoek bij kinderen op school, viel hierdoor jammer genoeg in het water. We werden deels genoodzaakt door het gebrek aan tijd van de leerkrachten en de moeilijkheden van de leerkrachten die ze moesten doorstaan bij het bereiken van hun leerlingen. Vanwege de coronacrisis zijn we dus genoodzaakt om het beoogde expirementeel onderzoek om te zetten in een systematische literatuurstudie. Het was immers niet haalbaar om een pilootstudie uit te voeren.
Wij wensen u veel leesplezier toe.
Adeel Hakimi en Tugay Poyraz Gent, juni 2020
iii
Inhoudsopgave
Algemeen Voorwoord ... ii
Inhoudsopgave ... iii
Lijst van de gebruikte figuren ... v
Lijst van gebruikte tabellen ... vi
DEEL 1: Inleiding en Theoretisch achtergrond ... 1
1.1 De introductie ... 1
1.2 De situering ... 2
1.2.1 De definitie van de sociale robot ... 2
1.2.2 De componenten van een sociale robot ... 3
1.3 De sociale robot in het onderwijssysteem ... 4
1.3.1 Het doel van de sociale robot in het onderwijs ... 4
1.3.2 De bestaande modellen in het onderwijssysteem en hun functionaliteiten ... 5
1.4 De interactie tussen het kind en de sociale robot ... 13
1.4.1 De acceptatie van de sociale robots door het kind ... 13
1.4.2 De houding en de omgang van het kind tegenover de sociale robot ... 13
1.4.3 Het potentieel impact van de sociale robot op het kind ... 14
1.5 De ethische discussie in verband met de sociale robot ... 15
1.5.1 De problematiek rondom privacy bij implementatie van de sociale robot ... 16
1.5.2 De band tussen het vertrouwen en het gedrag van het kind met de sociale robot ... 17
1.5.3 Het effect op de ontwikkeling van het kind door de sociale robot ... 17
1.5.4 De agressie tegenover de sociale robot ... 18
1.5.5 De verantwoordelijkheid bij het omgaan met de sociale robot ... 18
1.5.6 De algemene ethische wetten bij implementatie van de sociale robot ... 19
1.6 Samenvattend ... 20
Deel 2: Methodologie ... 21
2.1 De probleemstelling ... 21
2.2 De eerder verwerkte systematishe literatuurstudies en hun resultaten ... 21
2.3 De onderzoeksmethodologie ... 21
2.3.1 De onderzoeksvraag... 22
2.3.2 De zoektocht naar onderzoeken en de selectie hiervan ... 22
2.3.3 Het resultaat en de ordening van de gevonden artikels ... 24
2.3.4 De coding van de artikels ... 25
Deel 3: Resultaten en Discussie ... 26
3.1 De situering van de artikels van de systematische literatuurstudie ... 26
3.1.1 De titel van het artikel ... 26
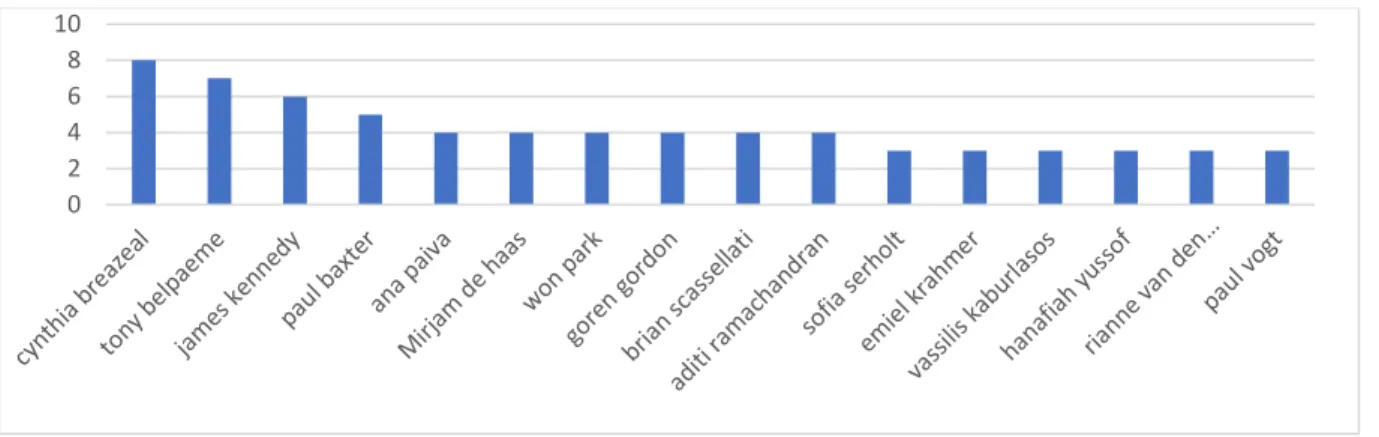
3.1.2 De auteur van het artikel ... 27
3.1.3 De typologie van de artikels ... 28
iv
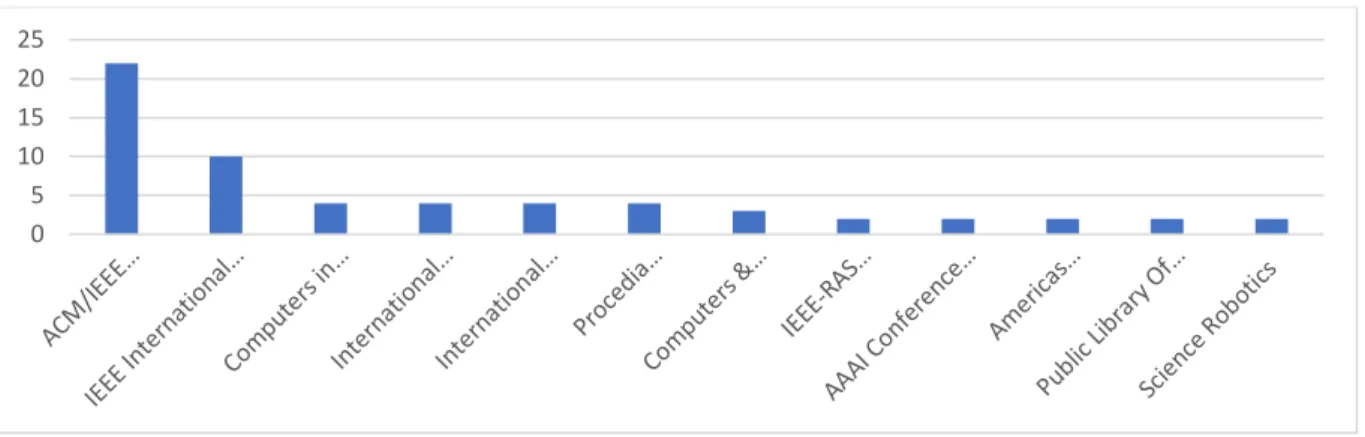
3.1.5 De publicatiejaar waarin de artikels zijn verschenen ... 29
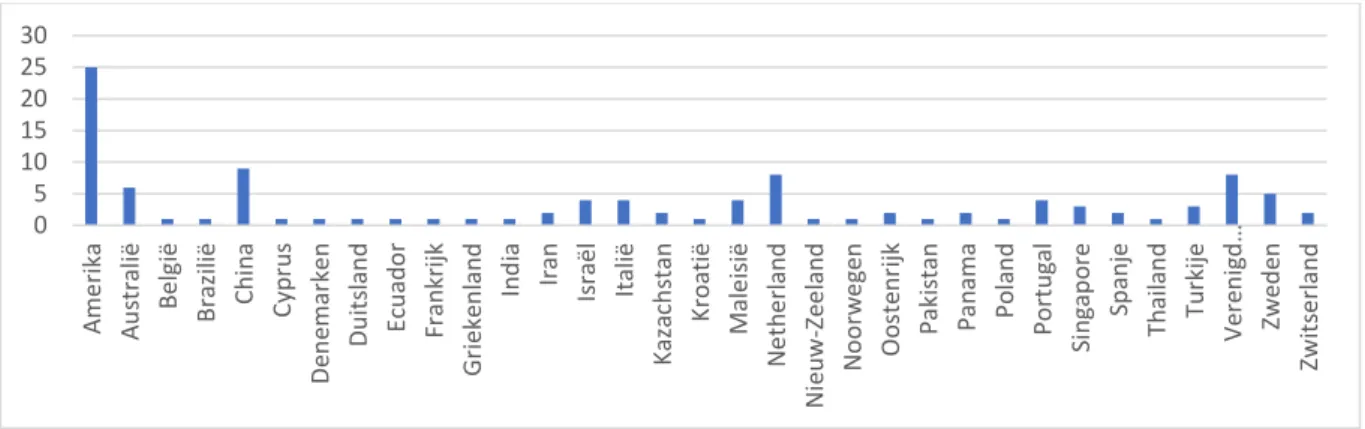
3.1.6 Het land van het onderzoek die gevoerd is bij de artikels ... 30
3.1.7 De steekproefomvangen van de onderzoeken binnen de artikels ... 30
3.2 De evolutie en de richting van het onderzoek naar sociale robots in het onderwijs ... 31
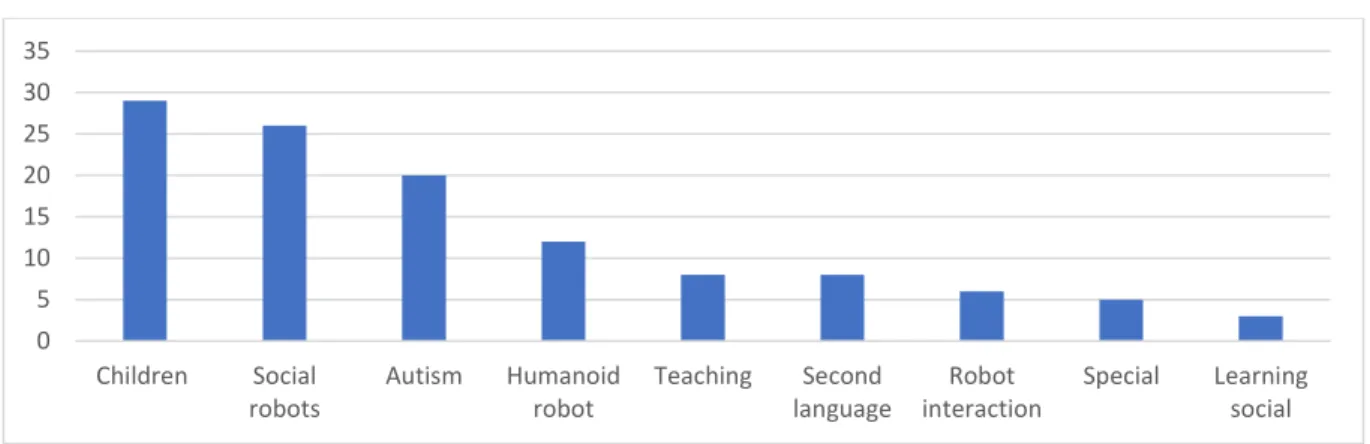
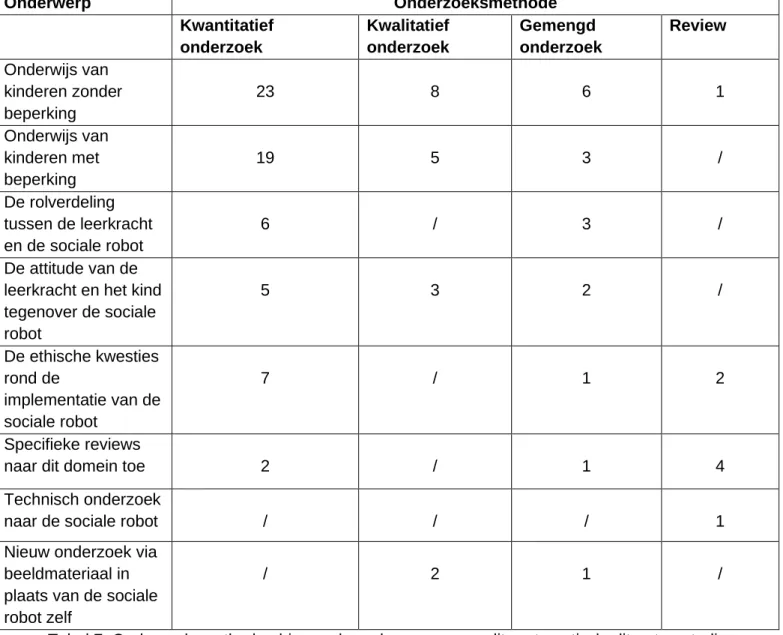
3.2.1 Meest voorkomende onderwerpen in de systematische literatuurstudie ... 31
3.2.2 De manier waarop het onderzoek is voortgebracht bij de artikels ... 32
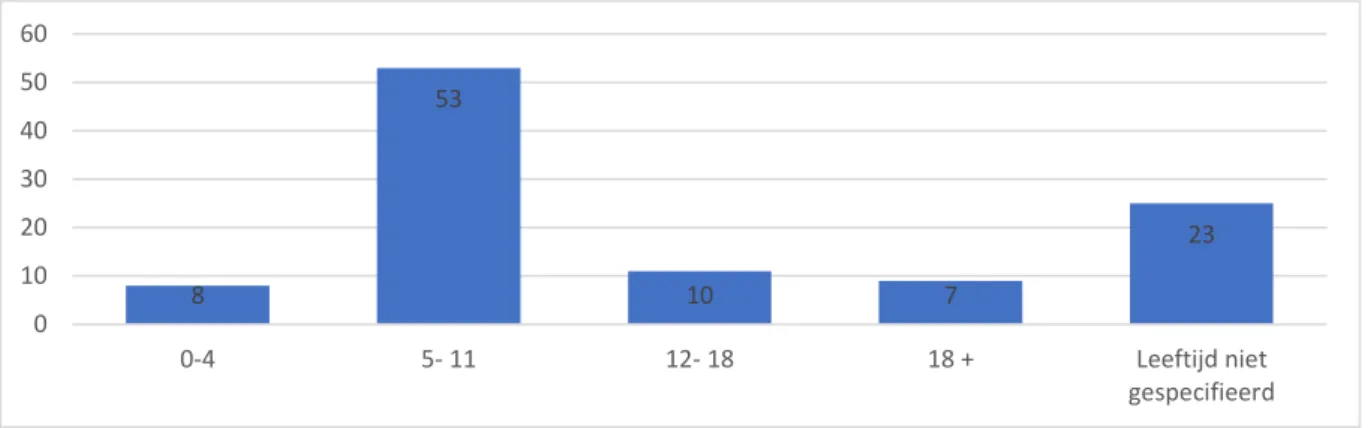
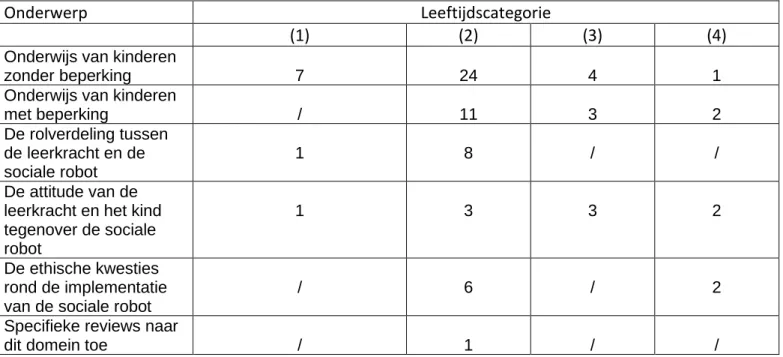
3.2.3 De leeftijd van de kinderen binnen het onderzoeksdomein ... 34
3.2.4 Het effect van sociale robots op kinderen zonder beperking ... 35
3.2.5 Het effect van de sociale robot op kinderen met beperking ... 47
3.2.6 De verdeling van rol tussen de leerkracht en de sociale robot bij implementatie van de sociale robot in de klasomgeving ... 56
3.2.7 Het effect van sociale robots op de attitude van de leerkracht en op de attitude van het kind... 58
3.2.8 Het ethische, adaptieve en empatieke aspect rondom de implementatie van de sociale robot binnen het onderwijssysteem ... 60
3.2.9 Reviews naar het onderzoek van het effect van sociale robots op kinderen ... 61
3.2.10 Discussie van evolutie en de richting van het onderzoek naar de sociale robot in het onderwijs ... 63
3.3 De toepassingen van de sociale robot in het onderwijs ... 65
3.3.1 De toegepaste social robots binnen het onderwijssysteem ... 65
3.3.2 De rol van de toegepaste sociale robots in deze systematische literatuurstudie ... 65
3.3.3 De vaardigheden van de sociale robots die voorkomen in deze systematische literatuurstudie ... 66
3.3.4 Discussie van de toepassingen van de sociale robot in het onderwijs ... 67
3.4 De impact van de sociale robot op kinderen in het onderwijs ... 69
3.4.1 Discussie van het effect op het kind door het implementeren van de sociale robot in het onderwijs ... 69
3.5 De ondervonden leemtes binnen het onderzoek ... 70
3.6 De ambitieuze pistes voor toekomstig onderzoek ... 72
3.6.1 Ambitieuze piste tot nadere onderzoeken ... 72
3.6.2 Beleidsadviezen ... 73
3.7 Het raamwerk voor toekomstig onderzoek ... 73
Deel 4: Conclusie ... 74
Bibliografie ... 76
Bijlagen ... 91
Bijlage 1. De codingstabel( met voorbeeld invulling) ... 91
Bijlage 2. De mappingstabel(met voorbeeld invulling) ... 91
Bijlage 3. Mapping van de artikels binnen het onderzoek naar het effect van sociale robots op kinderen zonder beperking .... 92
Bijlage 4. Mapping van de artikels binnen het onderzoek naar het effect van sociale robots op kinderen met beperking ... 107
Bijlage 5. Mapping van de artikels binnen het onderzoek naar het effect van sociale robots op de rolverdeling van leekracht en sociale robot ... 118
Bijlage 6. Mapping van de artikels binnen het onderzoek naar het effect van de sociale robot op de attitude vande leerkracht en op dat van het kind ... 121
Bijlage 7. Mapping van de artikels rond het onderzoek naar het effect, adoptie en empathie van de sociale robots op het ethiek van het kind ... 124
v
Lijst van de gebruikte figuren
Figuur 1: De sociale robot architectuur……….. 3
Figuur 2: Kaspar in interview……… 7
Figuur 3: Nao in gesprek……….. 7
Figuur 4: Pepper in actie………... 8
Figuur 5: Pepper in gesprek………. 9
Figuur 6: Matilda robot……….. 9
Figuur 7: Paro……….. 10
Figuur 8: Tega in actie……… 10
Figuur 9: Tega………...……….. 11
Figuur 10: Zeno……… 11
Figuur 11: Rubi-5………. 11
Figuur 12: Robovie……….. 12
Figuur 13: Zoektocht en selectie van de artikels voor deze systematische literatuurstudie………. 24
Figuur 14: Frequentiegrafie met betrekking tot meest voorkomende woorden in de titiels………. 26
Figuur 15: Frequentiegrafiek meest voorkomende auteurs……….. 27
Figuur 16: Typologie van de artikels………. 28
Figuur 17: De meest voorkomende publicatiebladen……… 29
Figuur 18: Aantal onderzoeken per jaar………... 29
Figuur 19: Landen waarin de onderzoeken van de artikels zijn gevoerd………... 30
Figuur 20: Steekproefomvangen van de artikels………. 30
Figuur 21: Frequentiegrafiek leeftijden van de kinderen……… 34
Figuur 22: Relatief belang van artikels over kinderen zonder beperking(N=39)……… 36
Figuur 23: Verdeling van onderzoek naar taal en taalontwikkeling door sociale robots……….. 37
Figuur 24:Verdeling onderzoek naar implementatie van sociale robots binnen onderwijs naar wetenschaponderwerpen………... 39
Figuur 25: Verdeling onderzoek naar effect van sociale robots op concentratie en aandacht van kinderen……… 42
Figuur 26: Ontwikkeling binnen onderzoeksdomein……….. 46
Figuur 27: Frequentie van de artikels over kind met beperking(N=27)………... 47
Figuur 28: Frequentie van onderzoek naar het effect van de sociale robot op sociale interactie en relatie………. 49
Figuur 29: Frequentie onderzoek naar effect sociale robot op zelfzorg en onafhankelijkheid ……… 51
Figuur 30: Frequentie onderzoek naar effect sociale robots op het emotioneel welzijn………... 52
Figuur 31: Frequentie van onderzoek naar het effect van sociale robots op het sensoriek en imitatie ……… 53
Figuur 32: Frequentie van onderzoek naar het effect van sociale robots op het motoriek ………. 54
Figuur 33: Frequentie onderzoek naar het effect van sociale robots op kinderen met gehoorproblemen of hersenverlamming………... 55
Figuur 34: Relatief belang van artikels over de verdeling van rol tussen leerkracht en sociale robot (N=9)……… 56
Figuur 35: Relatief belang van artikels over de verdeling van rol tussen leerkracht en sociale robot (N=10)………….. 58
Figuur 36: Frequentie binnen het onderzoek naar de ethische kwestie (N=10)… ……… 61
Figuur 37: Frequentie onderwerpen van de reviews (N=7)………... 62
Figuur 38: Meest voorkomende sociale robots in de systematische ltieratuurstudie……… 65
Figuur 39: Top drie voorkomende rollen van de sociale robots……… 66
vi
Lijst van gebruikte tabellen
Tabel 1: Vergelijking van sociale robots inzetbaar in het onderwijs, gebasseerd op definitie zie 1.2.1……….. 5-6
Tabel 2: De ethische kwestie van de sociale robot………... 16
Tabel 3: De systematisch literatuutstudie protocol toegepast in deze onderzoek………... 22-23 Tabel 4: Informatie over de meestvoorkomende auteurs……… 27-28 Tabel 5: Het aantal geobserveerde studies per onderwerp………... 31
Tabel 6: Manier van onderzoek binnen de artikels………. 32
Tabel 7: Onderzoeksmethoden binnen de onderwerpen van dit systematische literatuurstudie……… 33
Tabel 8: Aantal artikels per leeftijdscategorie bij elk onderzoekdomein………. 35
Tabel 9. Mapping artikels over taal-en taalontwikkeling & gebarentaal……….. 36
Tabel 10: Mapping artikels van ontwikkeling wiskundig inzicht bij kinderen door sociale robots……… 38
Tabel 11: Mapping artikels van onderzoek naar het algemeen effect en voordeel…..………... 39-40 Tabel 12: Meest voorkomende begrippen met betreking rond voordeel en effect sociale robots ……….. 40
Tabel 13: Opportuniteitenopgemerkt bij het voordeel en algemeen effect van de sociale robot………. 41
Tabel 14: Mapping artikels van onderzoek naar het effect op de concentratie en de aandacht………... 41-42 Tabel 15: Mapping artikels van onderzoek naar de rol van de sociale robot binnen het onderwijs voor kinderen zonder beperking ………. 43
Tabel 16: Verschillende rollen van de sociale robot binnen het onderwijs en frequentie ……….. 43-44 Tabel 17: Mapping artikels van onderzoek naar het effect van de sociale robot op kleuters……….. 45
Tabel 18: Samenvattend tabel voor onderzoek naar het effect sociale robots op kleuters...……… 45
Tabel 19: Mapping artikels naar andere onderzoeken binnen domein van kinderen zonder beperking……… 46
Tabel 20: Mapping artikels naar het onderzoek op communicatie ………. 47
Tabel 21: Mapping artikels naar het onderzoek op de sociale interactie en relatie ……….. 48
Tabel 22: Samenvattend tabel voor onderzoek naar effect sociale interactie van sociale robots……….. 49
Tabel 23: Mapping artikels naar het onderzoek op het potentieel dat de sociale robot teweegbrengt bij kind met beperking op het vlak van zelfzorg……… 51
Tabel 24: Mapping artikels naar het onderzoek op het effect van de sociale robot op het emotioneel welzijn ………... 52
Tabel 25: Mapping artikels naar het onderzoek op het sensorische en imitatievermogen ………. 53
Tabel 26: Mapping artikels naar het onderzoek op het motorische ervaring/vermogen………... 54
Tabel 27: Mapping artikels van onderzoek naar kinderen met gehoorproblemen en hersenverlamming... 55
Tabel 28: Mapping artikels naar het onderzoek op de verdeling van rol………. 56
Tabel 29: Mapping artikels van onderzoek naar het effect de attitude ………….……….. 58
Tabel 30: Mapping artikels van onderzoek naar het ethische aspect……….. 60
Tabel 31: Mapping artikels van ………... 61-62 Tabel 32: Vaardigheden sociale robot……… 66-67 Tabel 33: De impact van de sociale robot op het kind……… 69 Tabel 34: Voorkomende leemtes bij de artikels……… 70-71
1
DEEL 1: Inleiding en Theoretisch achtergrond
1.1 De introductie
De dag van vandaag zijn er veel technologieën binnen het onderwijssysteem die gebruikt worden om kinderen te helpen met domeinen binnen het onderwijssysteem. Deze technologieën zoals computers, tablets en GSM’s bieden veel mogelijkheden aan de leerkrachten om de lessen meer interactiever en boeiender te maken, waarbij de leerkracht de kinderen er meer kan bij betrekken. Daarnaast bieden deze technologieën de mogelijkheid om één op één de les aan te bieden. Alsook op maat gemaakt studiepakket die moeilijker zijn in de traditionele lesvormen, kunnen op deze manier aangereikt worden aan de kinderen. (Golonka et al., 2014). Een nieuwe technologie die gebruikt wordt in het onderwijs en tevens het hoofdpunt binnen deze systematische literatuurstudie is sociale robots. Sociale robots zijn ontworpen voor interactie en communicatie met de mensen, in deze systematische literatuurstudie speficiek kinderen. De interactie en communicatie gebeurt semiautonomisch of volledig autonomisch (Onyeulo & Gandhi, 2020). In dit eindwerk zullen de eigenschappen weergegeven worden van enerzijds de sociale robots die volledig autonoom werken en anderzijds van sociale robots waarbij de mogelijkheid bestaat om het autonoom te laten functioneren. De sociale robot kan meerdere functies vervullen binnen het onderwijssysteem. Het kan zodanig geprogrammeerd worden, zodat het meerdere rollen kan opnemen zoals interviewer, coach, leerkracht en peer (Hegel et al., 2009).
Verder is er een verschil tussen een virtuele agent bijvoorbeeld Siri van Apple en Alexa van Amazon en de sociale robot, want een sociale robot heeft altijd een fysiek lichaam. De ontwikkelingen van de sociale robots kent een piek in de laatste jaren (Breazel, 2017). Dit heeft als gevolg dat de sociale robots als test gehanteerd worden in verschillende locaties, zoals de gemeentehuizen, de ziekenhuizen, de bejaardehuizen en het onderwijs (van den Berghe et al., 2018, p. 287).Er is een algemene behoefte aan onderzoek naar hoe sociale robots samenwerken met mensen. Dit is een groeiend gebied van sociale robotica en zal verschillende raakpunten hebben, onder andere vergrijzende samenlevingen, productie, constructie, klantenservice, onderwijs en ontwikkeling van kinderen. Er komt namelijk ook veel initiatief uit de industriewereld op vlak van sociale robots (Baillie et al., 2019).
Het doel van deze systematiche literatuurstudie is om de huidige kennis rond sociale robots in het onderwijs in kaart te brengen. Enerzijds het identificeren van de domeinen die werd onderzocht. Anderzijds het categoriseren van de zorgen en kansen die verband houden met het implementeren van sociale robots in een educatieve context, zoals gerapporteerd in de bestaande literatuur.
In deze thesis wordt de systematische literatuurstudie geconstrueerd om volgende zaken te onderzoeken:: - Wat de stand van zaken zijn op het onderzoek naar sociale robots voor kinderen in het onderwijs. - Wat de evolutie en richting is van onderzoek is naar sociale robots in het onderwijs.
- Wat de toepassingen en functionaliteiten zijn van de sociale robots in het onderwijs. - Wat de impact is van social robots op het in het onderwijs.
Kortom wat de invloed is van sociale robots op de manier waarop onderwijs wordt gegeven aan kinderen in het onderwijs. De definitie van de sociale robot zal beschreven worden alsook de modellen en toepassingen zullen besproken worden. De interactieaspecten van het kind met de social robot en de ethische kwestie hiervan komt aan bod. Het onderzoek zal uitgevoerd worden aan de hand van een systematische literatuurstudie en draait voornamelijk rond deze aspecten. Hieraan wordt gekoppeld wat de evolutie van onderzoek is naar het effect van de sociale robots. Tot heden is er veel onderzoek gedaan naar de sociale
2
robots op zich. De toepassing van sociale robots in het onderwijs is volop in groei (Bishop et al., 2019). De vraag is natuurlijk of deze een positief of potentieel effect kan hebben op de onderwijsimplementatie bij kinderen.In de thesis wordt eerst de literatuur en theoretische achtergrond van sociale robots bestudeerd. In DEEL 1 wordt de inleiding en theoretische achtergrond weergegeven. Hierbij worden de kenmerken behandeld die in onderzoek gevoerd zijn rond het onderwerp en wordt er een definitie uitgewerkt voor de sociale robot verder worden de toepassingen van de sociale robot weergeven. De aspecten van de kind-robot relatie en de ethiek rond de toepassing van de sociale robot binnen het onderwijs zijn verdere aspecten die aanbod komen in DEEL1. Daarop volgt DEEL 2 waarin de methodologie wordt uitgelegd van de systematische literatuurstudie. DEEL 3 geeft de resultaten en discussies weer van de systematische litertuurstudie en tenslotte wordt er in DEEL 4 de conclusie weergegeven.
1.2 De situering
1.2.1 De definitie van de sociale robot
Recentelijk zijn de sociale robots in een opmars vooral voor het gebruik in het dagelijkse leven en zijn ze meer en meer toegankelijk voor de gewone consument (Eguchi & Okada , 2019). Hierbij kan de volgende vraag gesteld worden, namelijk wat is een sociale robot?
Bij deze …
Algemeen wordt een sociale robot gezien als een autonome agent die kan handelen op een sociaal gepaste manier, gebaseerd op de gegeven rol binnenin de interactie (Duffy, 2003; Fong, Nourbakhsh & Dautenhahn , 2003; Serholt, 2017; Neumann, 2019). Sociale robots kunnen dus voorgesteld worden als robots die capabel zijn om zinvolle sociale interacties aan te gaan met de mens (Breazeal, 2003; Fong, Nourbakhsh & Dautenhahn, 2003). Sociale robots zijn autonome robots die in staat zijn om te interageren en te communiceren met zichzelf, met de mensen en met de omgeving waarin ze bevinden. Ze zijn ontworpen om te kunnen functioneren binnen de aangenomen en algemeen geaccepteerde sociale en culturele normen (Li et al., 2011). Yan et al. (2013) & Kanda et al. (2003) zeggen hierbij dat een sociale robot een robot is die opgegeven taken kan uitvoeren, bij dit is een belangrijke conditionering dat sociale robots de eigenschap hebben om bij interactie met mensen vast te houden aan bepaalde signalen en regels. Sociale robots zijn belichaamde agenten die deel uitmaken van een heterogene groep: een samenleving van robots of mensen. Ze zijn in staat elkaar te herkennen en sociale interacties aan te gaan, ze hebben een geschiedenis (de wereld waarnemen en interpreteren in termen van hun eigen ervaring) en ze communiceren expliciet met elkaar en leren van elkaar (Sarrica, Brondi & Fortunati, 2019).
Over het algemeen worden sociale robots beschreven als autonome agenten, complexe machines of technologische toepassingen. Het fundamentele kenmerk van sociale robots als autonome systemen, hoewel hun mate van autonomie nooit wordt besproken (Beer, Fisk & Rogers, 2014). Een volledig op afstand bestuurbare robot kan niet als sociaal worden beschouwd, omdat het zelf geen beslissingen neemt, dit is dan enkel een uitbreiding van de mens (Bartneck & Forlizzi, 2004). De term sociaal in dit geval vertegenwoordigt het feit dat er twee of meer entiteiten binnen dezelfde context zijn (Hegel et al., 2009). Sociale robots representeren een technologie die voorziet in positionering en belichaming, dus sociale robots zijn autonome fysische agenten met meestal menselijke eigenschappen die kunnen interageren met mensen op een natuurlijke wijze voor een lange periode (Vogt et al., 2017).
3
Kortom, sociale robots van de eenentwintigste eeuw zijn creaties die ongelijksoortige elementen samenvoegen namelijk biologische en technologische kenmerken tot een beeld dat zich aan de buitengrens van mens bevindt. Deze combinatie van menselijke en niet-menselijke elementen zorgt voor een mijlpaal binnenin de technologische ontwikkeling en brengt potentieel met zich mee (Marti et al., 2006). De zogenaamd provocerende uitingen uitgaande van de sociale robot naar de mens toe brengt de wetenschap technologische bekwaamheid bij en zorgt ervoor dat de mens buiten de mens nog een sociale partner kan hebben (Shaw-Garlock, 2009).In deel 1.2.2. worden de belangrijkste componenten van de sociale robot en de samenstelling van deze componenten besproken.
1.2.2 De componenten van een sociale robot
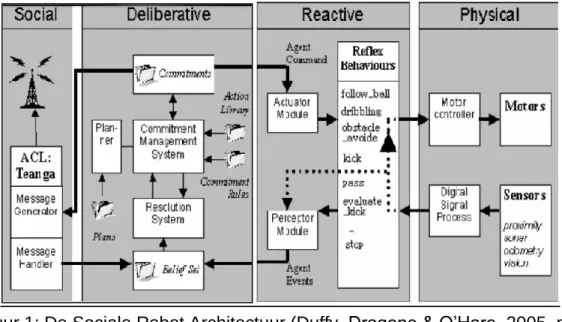
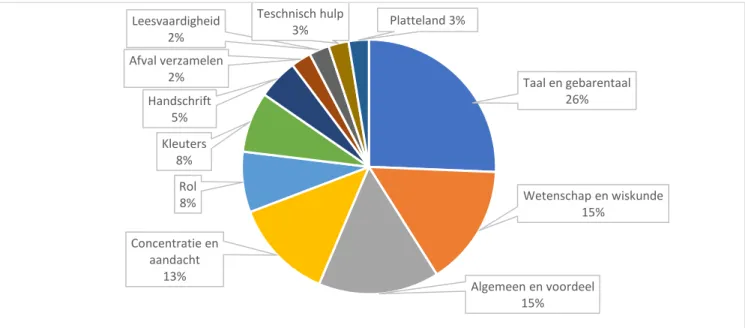
Figuur 1: De Sociale Robot Architectuur (Duffy, Dragone & O’Hare, 2005, p. 3)
Hierbij Figuur 1 die een voorstelling van de lagen of componenten van de sociale robot die werd verklaard in 1.2.1. De sociale robot bestaat uit een fysieke laag, een reactieve laag, een overleggende laag en een sociale laag. De fysieke laag bestaat uit de motoren en sensoren van de sociale robot die ervoor zorgen dat de sociale robot mechanisch kan werken. De robot neemt een plaats in binnen de omgeving en wordt bestuurd door motorische actie met hierbij het gevoel van de omgeving aan de hand van de sensoren (Tan, Thomsen & Duan, 2015). De fysieke laag voorziet gemakkelijk draagbaarheid van de sociale robot tussen de verschillende fysische platforms. De sensorische en motorische mogelijkheden en/of bruikbaarheid kunnen veranderen als antwoord op een digitaal signaal (Duffy, Dragone & O’Hare, 2005).
De reactieve laag zorgt ervoor dat de sociale robot antwoord kan bieden op belangrijke sensorische reflexen zoals het volgen van een bal, dribbelen met een bal, het ontwijken van een obstakel enzovoort (Tan, Thomsen & Duan, 2015). Deze reflexen worden doorgegeven aan de overleggend laag. De reactieve laag controleert de fysieke laag en dirigeert een arsenaal aan primitieve eenheden namelijk activiteiten en houdingen. Activiteiten zijn voornamelijk verantwoordelijk voor data overname, sensorische bewerking daarvan en het laten lopen van deze activiteiten (Duffy, Dragone & O’Hare, 2005). Aan de andere kant ontvangt de reactieve laag opdrachten van de sociale laag via de overleggend laag en geeft het opdrachten door via de overleggend laag door aan de sociale laag, deze laag funcioneert als het ware als een portier voor het al dan niet uitvoeren van de activiteit (Hegel et al., 2009). De overleggende laag daareentegen bevat de inzet en het zelfkunnen van de sociale robot die werken als een tussenstuk voor de sociale en reactieve
4
laag. De overleggend laag heeft ook een planmechanisme dat het vooruitzicht van uit te voeren activiteiten door de sociale robot bijhoudt. Ook nog bevat deze laag het uitvoeringssysteem, regels en set van mogelijkheden van de sociale robot (Duffy, Dragone & O’Hare, 2005).Ten laatste bevat een sociale robot een sociale laag. Deze laag bepaalt de interactie tussen de sociale robot en het interactiepunt aan de hand van communicatiesignalen. De sociale laag bevat een bericht-generator die alle berichten en acties finaal definiëert voor het uitgaat van de sociale robot. Ook bevat deze laag een bericht-behandelaar die ervoor zorgt dat alle inkomende signalen juist worden doorgegeven naar de andere lagen toe (Hegel et al., 2009). De sociale laag kan genoemd worden als de koppelingspunt van de sociale robot met de buitenwereld (Duffy, Dragone & O’Hare, 2005).
1.3 De sociale robot in het onderwijssysteem
Na het weten van wat de sociale robot precies is en uit wat het bestaat is het belangrijk om te weten wat het het doel van de implementatie van deze sociale robot in het onderwijs is en welk type sociale robots er in lijn zijn met de definitie in 1.2.1 Het doel van de toepassing van de sociale robot in het onderwijs en welke modellen men precies gebruikt wordt neergezet in dit deel. Deze in lijn met de sociale robot die verklaard werd in 1.2.1.
1.3.1 Het doel van de sociale robot in het onderwijs
In de recente jaren zijn er heel veel voorbeelden over gebruik van interactieve constructies zowel in het onderwijs algemeen als bij therapie of opvoeding van kinderen in het bijzonder onderwijs. Deze constructies hebben het doel om het onderwijs efficiënter te maken en daarbij toegang tot het onderwijs te vergemakkelijken (Robbins et al., 2004).
Het gebruik van technologie in onderwijs zorgt ervoor dat het communicatievermogen en het gedrag van kinderen verbetert ten opzichte van het onderwijs en leerstof. Sociale robots hebben een enorm potentieel als steunmiddel bij aanleren van leerstof en hoe de kinderen de leerstof opvatten en interpreteren (Kossewska & Klosowska, 2020). Lytridis et al. (2019) geven aan dat ter beschikking hebben van dergelijke toestellen in schoolomgeving de mogelijkheid aanbiedt om autonomer en efficiënter het leerproces aan te pakken en te ondersteunen. Bijgevolg kan een sociale robot in het onderwijs wegen openen waarbij kinderen potentieel kunnen ontwikkelen (Neumann, 2019).
De vertoning van een robot in een klaslokaal kan het effect hebben van een positief agent en kan functioneren als drijfveer voor sociaal interactievermogen, hierbij is het wel belangrijk om de psychologische perspectieven in leerling-robot interactie goed in te bouwen voor een complete werking van de sociale robot (Ismail, Hanapiah & Wyffels, 2019). De potentie bestaat hierin dat de sociale robot de rol van onderwijzer kan innemen en daarbij als leermedewerker kan dienen. Ook kan de sociale robot als een leeftijdsgenoot van het kind de sociale ontwikkeling van het kind bevorderen (Smakman & Konijn, 2019). Bij het inzetten van de sociale robots in het onderwijs is het van belang om rekening te houden met: sociale interactie, gedragsfunctie, aanleermethoden, karakteristieken als leerkracht, kenmerken en inhoud van de leerstof (Chootongchai, Songkram & Piromsopa, 2019). De praktijk van het inzetten van sociale robots heeft volgens Chootongchai, Songkram & Piromsopa (2019) een enorm positief impact op het denkvermogen en probleemoplossingscapaciteit waarbij het ook de kind zijn/haar motivatie en attentie verhoogt.
De kans bestaat dat ondanks het kind zich enorm gemotiveerd en leergierig voelt na contact met een sociale robot dat het kind zich minder inzet voor sociale contact met anderen kinderen of voor andere activiteiten
5
door het hevig sociaal contact van de sociale robot (Alcorn, 2019). Het gaat er voornamelijk om dat sociale robots kinderen aanspreken door hun fysieke antwoord capaciteit dit is een heel andere beleving voor kinderen dan de gewone computer die niet in staat is daarvoor (Neumann, 2019). De aanpak met een sociale robot is gepersonaliseerd. Doordat de sociale robot antwoord kan bieden op de prikkels van het kind zowel op schoolmaterie als zaken buiten schoolomgeving is de inzet van een sociale robot een volkomen pakket voor het omvormen van een kind in het onderwijs (Khosla et al, 2012).
Tot slot kan er dus worden gezegd dat er een evolutie is naar individueel gecentreerd onderwijs met het doel om de kwaliteit van het onderwijssysteem omhoog te trekken. Hierbij als visie een verbetering van de prestaties van de kinderen dit zowel in hun direct sociaal omgeving als hun schoolomgeving (Khaksar et al., 2019).
1.3.2 De bestaande modellen in het onderwijssysteem en hun functionaliteiten
Vergelijking van de types van de sociale robot in het onderwijs op basis van de verdeling van kenmerken/eigenschappen die zijn weergegeven in ‘Social Robotics in Education: State-of-the-Art and Directions’ (Pachidis et al, 2018, p. 3) en welke men in dit werk belangrijk acht voor een implementatie in het onderwijs. De vergelijkende eigenschappen zijn de naam van de sociale robot, de batterijduur, de connectiemogelijkheden en het potentieel van de sociale robot bij implementatie. Hierbij de selectie van sociale robots op basis van het voorkomen in de literatuur en in lijn met de definitie in 1.2.1 Selectie van de sociale robots die voornamelijk worden ingezet in het onderwijsstysteem.
Tabel 1: Vergelijking van sociale robots inzetbaar in het onderwijs, gebasseerd op de definitie zie
1.2.1
Nr. Robot Batterijduur (uur) connectie potentieel 1. Kaspar 7 (Wood et al., 2019) WI-FI/ Ethernet (Wood et al., 2019) - Mensachtig - Effectief leermedium- Helpt kinderen bij ontdekken van het lichaam - Aanpassingsgedrag - Gedragsimitatie - Mens-robot relatie (Wood et al., 2019) 2. Nao 1 – 1.5 (Pachidis et al., 2018) Ethernet, Wi-Fi (Pachidis et al, 2018) - Therapie - Assitentie - Gedragimitatie
- Overdracht sociale vermogen - Interactie met leerkracht - Interactie met omgeving - Sociale rolvertoning (So et al., 2019) 3. Pepper 12 (Pandey & Gelin, 2018) Ethernet , WI-FI (Pandey & Gelin, 2018) - Verbaal communicatie - Communicatiemedium - Sociaal interactie - Sociaal communicatie
6
4. Matilda robot - Diverse stoppoorten automatisch parkeren en opladen van de batterij (Khosla & Chu, 2013) WIFI & draadloze verbinding met andere apparaten( Khaksar et al., 2019) - Stemherkenning - Gezichtsherkenning - Sociaal communicatie - Non-verbaal intelligentie - Emotieherkeninig en uiting - Sociaal ontwikkeling - Fysieke ontwikkeling - Fysieke zorg- Integratie met netwerk (Khosla et al., 2012) 5. Paro 1 (Wada et al., 2010) Niet van toepassing
- Therapeutische sociaal robot - Inzetbaarheid in de zorg - Sociaal contactsbron - Social interactie
- Sociaal verbondenheid
- Verwerking van informatie uit de omgeving - Geluidreproductie (Moyle et al., 2017) 6. Tega 6 (Park et al., 2017) WI-FI (Gordon et al., 2016)
- Langdurige interacties met kinderen - Taal en verhaal onderwijs
- Intelligente interactie
- Herkenning van fysiek interactie
- Aanleren van woorden en informatie aan kinderen - Articulatie en productie lipsynchronisatie
- Feedback aan kind - Emotie reproductie
- Sociale vriend van het kind (Gordon et al., 2016) 7. Zeno Kabelverbin ding/stroom verbinding (Ranatunga et al., 2011) WI-FI & ethernet (Salvador, Silver & Mahoor, 2015)
- Ervaring aan sociaal contact
- Aanleren van nieuwe tekens en gezichtsuitdrukkingen - Sociaal interactie
- Onderwijs van jonge kinderen
- Aanleren van communicatie elementen - Productie van concentratie-efficiëntie (Kirstein & Risager, 2016)
8. RUBI-5 Stroom-verbinding (Johnson et al., 2012) Niet van toepasing - Sociale intelligentie - Sociale communicatie - Breed scala aan emoties - Gezichtsuitdrukkingen
- Inzetbaar voor objectmanipulatie (Johnson et al., 2012) 9. ROBOv ie Niet van toepassing Niet van toepassing - Sociaal contact - Sociale intelligentie
- Zelf beginnen en zelf beïndigen van sociaal contact - Inzetbaar in heel diverse omgevingen
(Mitsunaga et al., 2006)
7
1.3.2.1 Kaspar
Figuur 2: Kaspar in interview (Wood et al., 2013, p. 4)
Kaspar is een sociale robot zogenaamd een menselijk robot die ontwikkeld is voor sociale interactie. De sociale robot Kaspar wordt voornamelijk gebruikt bij mens-robot interactie onderzoek met betrekking tot neurotypisch en autistische kinderen. Deze kinderen reageren heel goed op de vertoning van de sociale robot met versimpelde eigenschappen van het mens (Wood et al., 2013).
Khaksar et al. (2019) beweren dat de ontwikkeling van sociale vaardigheden bij kinderen door inzet van Kaspar als spelpartner kan verbeteren. Kaspar is een innovatief instrument om de perceptie van sociale robots en sociale interactievermogen bij kinderen te onderzoeken. Kinderen met autisme ervaren de hulp van de sociale robot voor hun sociale vaardigheden positief. Doordat er mogelijkheden zijn tot personalisatie naar het kind toe en de sociale robot een neutraal expressie, consistent gedrag en hierbij de uitvoering van de gegeven opdrachten herhaaldelijk kan uitvoeren (Khaksar et al., 2019).
Tot slot is Kaspar een belangrijk component van succes bij interactie en daarbij horende interventie. Kaspar heeft potentiële educatieve rollen als trainer, verteller en bemiddelaar. De sociale robot kan waarde toevoegen aan leerdomeinen. Kaspar bezit hierbij ook de mogelijkheid om aan de hand van eigen software zelf interactie scenario’s te creëren zonder technisch ondersteuning van ontwikkelaars. De eindgebruiker kan de software naar wens aanpassen voor nieuwe leerscenario’s (Alcorn et al., 2019).
1.3.2.2 Nao
Figuur 3: Nao in gesprek (Ramachandran et al., 2018, p. 59)
8
Nao is een sociale robot die hoge flexibiliteit en hoge precisie kan vertonen in luister, spraak en ruimte bij sociale interactie met een kind. Hierdoor kan worden gezegd dat de Nao sociale robot voornamelijk aantrekkelijk is voor kinderen met autisme deze kinderen worden door Nao betrokken met spraak en beweging (Zhang et al., 2019).De eigenschappen van nao en de programmeerbare interface zorgen ervoor de Nao sociale robot ideaal is voor het inzetten bij onderzoek naar en therapie van kinderen met autisme (Taheri et al., 2016). Senft et al. (2017) vonden wel dat de sociale robot gebrek had aan een volkomen leerkrachtcapaciteit en om dit te verbeteren de Nao zou moeten worden aangepast aan de leerspecificiteiten van elk individueel gebruikend kind. Vogt et al. (2017) ontdekten hierop dat de sociale robot de moeilijkheid van de leertaak kan aanpassen aan het individuele niveau van het kind. Ook is er de mogelijkheid van het gebruik van co-spraakgebaren in combinatie met een op maat gemaakte leertaak die de beste resultaten opleveren. Spraakherkenning, spraakgeneratie, expressieve choreografie van lichaamsbeweging zijn daarbij verder eigenschappen van Nao (Lehmann & Rossi, 2019).
Nao heeft dus potentieel om onderwijspersoneel vooral bij te staan bij analyse van verandering in geometrische redenering van kinderen. De sociale robot zorgt voor meer plezier en aantrekking dan een virtueel agent waarbij beter onderwijs kan geleverd worden. Verbaal en non-verbaal communicatie, flexibiliteit, lichaamsbeweging, mobiliteit, prijs, realtime evaluatie van interactie zijn grote pluspunten van Nao (Khaksar et al., 2019).
1.3.2.3 Pepper
Figuur 4: Pepper in actie (Palanica, Thommandram & Fossat, 2018, p. 362)
Pepper is een sociale robot die hoog sociale conditinering bezit namelijk hoog frequente hand- en armbewegingen en volledige spraakherkenning met directe blik bij het spreken met het kind. Verbale en non-verbale communicatie zijn grote troeven van Pepper. Pepper bezit daarbij een expressief, intonatierijk en emotievolle spraak (Palanica, Thommandram & Fossat, 2018). Een variëteit aan sensoren maken het mogelijk voor Pepper om haar directe omgeving te interpreteren, objecten te onderscheiden en interactie aan te gaan met mensen in directe omgeving. Ook heeft Pepper een ingebouwde perceptie en interactie vermogen met inbegrip van mensdetectie en volging van gezichts- en spraakherkenning, blikherkenning en spraakcapaciteit. De sociale robot kan daarbij mensen aanspreken met spraak, geluid en/of andere bewegingen (Eguchi & Okada, 2019). Deze sociale robot is een persoonlijke robot die emoties kan begrijpen en onderscheiden en is ontwikkeld voor gebruik in alle domeinen van het leven. Pepper is mogelijk efficiënt bruikbaar in leef- en schoolomgeving van kinderen. Een troef is dat Pepper commercieel verkrijgbaar is voor iedereen (Eguchi & Okada, 2019).
9
Figuur 5: Pepper in gesprek (Eguchi & Okada, 2019, p. 329)
1.3.2.4 Matilda robot
Figuur 6: Matilda robot (Khaksar et al., 2019, p. 7)
Matilda is een sociale robot ontwikkeld met als doel emotionele interactie aan te gaan en te verhogen bij jonge kinderen. Met hierbij de ontwikkeling van sociale interactie vermogen bij deze jonge kinderen. De sociale robot Matilda lijkt hierbij op een baby. De sociale robot kan gemakkelijk verbonden worden aan andere technologieën dit geeft aan dat Matilda compatibel is met andere smart technologieën. Dit is een belangrijk eigenschap bij de ontwikkeling van sociale robots (Khaksar et al., 2019).
De sociale robot bezit hoge flexibiliteit in dienstverlening dat enorm potentieel bevat voor het inzetten bij jonge kinderen. Het doel van Matilda daarbij is om kinderen bij te staan in dagelijkse opdrachten en sociale interacties. Matilda kan de kinderen bijstaan om meer productief te zijn voor deze opdrachten en kan zowel het kind ondersteunen in directe omgeving. De sociale robot beschikt ook de mogelijkheid om de leerkacht bij te staan in zaken waarbij de onderwijzer niet kan voldoen dit is vooral het geval bij kinderen met beperkingen (Khaksar et al., 2019). Een minpunt van de sociale robot Matilda is dat deze sociale robot nog in volle ontwikkeling is en voorziene potentieel nog niet volkomen is bewezen (Khaksar et al., 2019).
10
1.3.2.5 Paro
Figuur 7: Paro (Roberts-Yates & Silvera-Tawil, 2019, p. 201)
Paro is een sociale robot die lijkt op een baby zeehond. Paro reageert op aanraking en geluid door staartbeweging, kop, door het openen en sluiten van de ogen en maken van geluiden die geljkaardig zijn aan een echt zeehond. Paro heeft een zachte vacht waarbij het ook beweegt met de vliezen, ogen en staart. Dit zorgt voor positioneel antwoord bij de kinderen waarmee het interageert. Gelijkerwijs produceert het gehuil bij raken of strelen als stimulus voor relaxatie en sociale interactie. Paro wordt gebruikt als gezelschap voor verbetering van zelfexpressie, relaxatie en emotieregulatie (Roberts-Yates & Silvera-Tawil, 2019).
1.3.2.6 Tega
Figuur 8: Tega in actie (Gordon et al., 2016, p. 3954)
Tega is een volledig autonoom sociale robot platform dat in het bijzonder is ontworpen om kinderen te betrekken in leerdomeinen. De sociale robot kan continu werken voor meerdere uren en is draagbaar met de mogelijkheid het op verschillende plaatsen te kunnen inzetten om langtermijn interacties met kinderen te onderhouden (Gordon et al., 2016). Tega is een sociale robot met aantrekkelijke, uitdrukkelijke en kindvriendelijke eigenschappen en is ontwikkeld voor langtermijn inzetting in meerdere educatieve scenario’s zoals bij kinderen thuis, scholen en therapiecentra (Park et al., 2017). Deze sociale robot is gelijkaardig aan het kind, namelijk het heeft dezelfde leeftijd als het kind en zal invloed uitoefenen op de taal, gedrag en overtuigingen door interactie. Tega bevat hierbij ook eigenschappen als kindgelijk hoog stem, overdreven postuur, gezichtsuitdrukkingen en denkproces van een kind. Tega kan redeneren wat de gedragstatus van het kind is en kan gedachtegoed doorgeven aan de hand van verbaal en non-verbaal gedrag (Park et al., 2017).
11
Figuur 9: Tega (Westlund et al., 2016, p. 384)
1.3.2.7 Zeno
Figuur 10: Zeno (Kirstein & Risager, 2016, p. 453)
Zeno is een sociale robot die een positie inneemt van een menselijk robot voor kinderen met bijzondere noden. Zeno heeft hierbij de mogelijkheid om verschillende emoties te vertonen bij de interactie met het kind. De sociale robot kan gebruikt worden om kinderen empathie en acceptabel gedrag aan te leren in sociale situaties en om ervoor te zorgen dat de kinderen een voldoende hoeveelheid aan zelfmotivering kunnen ontwikkelen bij het aanleren van leerdomeinen binnen het onderwijssysteem (Kirstein & Risager, 2016).
1.3.2.8 RUBI-5
12
RUBI-5 is een sociale robot met een gebruiksvriendelijke vertoning. De RUBI-5 sociale robot bezit de mogelijkheid om volledig autonoom te functioneren met de implementatie binnen veilige interactie met de kinderen. Deze sociale robot heeft een verhoogde complexiteit om meer te kunnen ondersteunen in complexere vormen van sociaal interactie en biedt de mogelijkheid om automatisch sensorisch data te laten analyseren met het kind waarmee het interactie is (Malmir et al., 2013).De voornaamste eigenschappen van de RUBI- 5 sociale robot zijn gezichtsexpressie, persoonherkenning en gezichtsuitdrukkingen herkennen. RUBI-5 kan de acitiviteiten die kinderen leuk vinden detecteren met even correctheid als ervaren leerkrachten. Ook kan RUBI-5 detecteren welke kinderen meer geïnteresseerd zijn in de sociale robot. De sociale robot kan hierbij gebruikt worden om kinderen hun sociaal, gedrag en affectieve staat te volgen. Een netwerk van zulke robots zou de mogelijkheid kunnen bieden om op grote schaal en op een goedkoope manier het onderwijs te verbeteren en ontwikkeling in de kleuterjaren van kinderen te begrijpen, opvolgen en te verbeteren (Malmir et al., 2013) Het doel van de RUBI-5 is om als digitaal ethnograaf te functioneren , dat alleen met een groep van jonge kinderen zou kunnen werken om hun gedrag te analyseren en hierbij hun onderwijsomgeving te verrijken (Malmir et al., 2013).
1.3.2.9 Robovie
Figuur 12: Robovie (Mitsunaga et al., 2006, p. 5068)
De sociale robot Robovie heeft beeldende menselijke bekwaamheid en meerdere sensoren voor detectie. Deze brengt de lichaamsbewegingen nodig om te kunnen communiceren met kinderen. De verschillende sensoren maken het mogelijk om autonoom gedrag te vertonen en interactie met kinderen te ondergaan. Alles wat nodig is voor de werking en controle van de sociale robot zit vervat in het lichaam (Kanda, 2003). Kanda et al. (2004) toonden aan dat de sociale robot gunstige effecten kan hebben op het taalverloop van kinderen en met succes gebruikt kan worden om kinderen met gehoorproblemen bij gebarentaal te helpen. Robovie geeft gunstige effecten van gebarenherkenning in deze context en verbaal via spraakgeneratie, non-verbaal via voorgeprogrammeerde gedragsscripts voor sociale interactie zoals handen schudden, knuffelen en zwaaien (Lehmann & Rossi, 2019). De Robovie kan met groot succes ingezet worden in alle domeinen van het onderwijssysteem (Kanda, 2003).
13
1.4 De interactie tussen het kind en de sociale robot
Voor de implementatie van de sociale robot na het weten van wat precies de sociale robot is , waarom het wordt toegepast en welke modellen er zijn. Is het belangrijk om te weten hoe de participanten namelijk de kinderen reageren op de sociale robot in het onderwijssysteem. Hierbij een aanduiding hoe het kind reageert op de sociale robot met name of het kind al dan niet de sociale robot accepteert, de manier waarmee het kind omgaat met de sociale robot en de impact van de sociale robot op het kind.
1.4.1 De acceptatie van de sociale robots door het kind
Met de groei in kind-robot relatie die zich meer en meer in de natuurlijke omgeving van het kind begint te vertonen is het belangrijk om te kunnen aantonen of het kind al dan niet de sociale robot accepteert (De Jong et al., 2020). Openheid voor ervaring van het kind zoals het gevoel van vreugde of plezier geassocieerd met het gebruik van nieuwigheden speelt een doorslaggevende rol in het al dan niet accepteren van de technologische ontwikkelingen. Daarmee wordt het pad vrij gemaakt voor het gebruik van sociale robots zowel op emotioneel als sociaal vlak bij het kind (Conti D, Commodari & Buono, 2017).
Hierbij is voornamelijk focus nodig naar het intentioneel accepteren van het kind dit maakt het mogelijk om te bekijken wat de effecten zijn op de psychologie van het kind zoals plezier dat het kind ervaart bij interactie met de sociale robot (De Jong et al., 2020). Hoewel kinderen weten de sociale robot geen echte persoon of mens is, accepteren ze de sociale robot als autoriteit vanwege het menselijk uiterlijk en gedrag van de sociale robots. De gezichtsuitdrukkingen en spraakimitatievaardigheden van de sociale robot zijn cruciaal (Özdemir, 2017). Ook moet in rekening gebracht worden dat er een discrepantie bestaat tussen het intentioneel accepteren van kinderen en de gedragsacceptatie tegenover sociale robots (De Jong et al., 2020). De gedragsproblemen die veroorzaakt worden door het verlangen en verwachten van positieve en negatieve emoties spelen een invloedrijke rol in de intentie om te werken met een sociale robot (Piçarra & Giger, 2018). Het is belangrijk dat ontwikkelaars, theoretici en managers rekening houden met deze impicaties voor een beter voorspelling en beïnvloeding van de succesvolle verspreiding van complexe technologische producten, zoals sociale robots (Piçarra & Giger, 2018).
Bovendien kunnen kinderen bang worden van de sociale robots, maar er zijn de positieve vertoningen van engagement om samen te werken met de sociale robot. Samengaand blijkt dat het positieve effect van de betrokkenheid van de gebruikers kan worden gegeneraliseerd naar verwante of vergelijkbare objecten. Wanneer kinderen deelnemen aan interactie resulteert dit in een meer positieve houding ten opzichte van de sociale robots in het algemeen en minder in angst (Reich-Stiebert, Eyssel & Hohnemann, 2019). Het nut van de sociale robot technologie is om storingen in de interacties van kinderen te voorkomen, zolang dat de sociale robots de storingen niet als lesopnames kan voordragen aan het kind zal de sociale robot enkel en alleen leerlingen kunnen onderwijzen over eenvoudige en rechttoe rechtaan taken. Hierbij is er echter de vraag of dit vanuit pedagogisch oogpunt enig voordeel oplevert (Serholt, 2018).
1.4.2 De houding en de omgang van het kind tegenover de sociale robot
Deze technologie biedt een veilig, realistisch implementatie van scenario’s die kunnen geïmplementeerd worden aan de hand van inspiratie op dagelijkse situaties met de voorziening van een omgeving dat geplaatst zelfstudie en direct feedback mogelijk maakt. Hierbij wordt de nood aan connectie met de ‘echte wereld’ geminimaliseerd gedurende het leerproces, dit is toch een grote bron van ongerustheid voor veel kinderen en vooral kinderen met autisme (Silvera-Tawil, Roberts-Yates & Bradford, 2018). Barakova et al. (2017) beweren dat spellen met fysieke objecten veel belovend zijn om sociaal robots er bij te betrekken in het
14
algemeen en vooral in het bijzonder onderwijs aangezien dat de kinderen hierin meer verenigen met fysiek communicatie in tegenstelling tot gewone computers. Onderzoek heeft uitgewezen dat gedrag invloed heeft op interactie tussen sociale robots en mensen. Hoewel sociale robots geen sociaal gedrag uiten kunnen ze gebruikt worden als educatief middel om kinderen bijvoorbeeld over technologie te onderwijzen. Sociale interactie is moeilijk te automatiseren en aan te leren aan kinderen. Sociale robots kunnen daarom ondersteunng bieden voor behoud van verbondenheid bij interacties (Belpaeme et al., 2018).Daarboven maakt consciëntieusheid het mogelijk voor de sociale robot waar te nemen die zich kan aanpassen aan de veranderende behoeften van de gebruiker, zelfs van sociaal gedrag, en dit leidt tot het idee dat het gebruik de dagelijkse activiteiten zou verbeteren. De persoonlijkheidsfactor die een bepalende rol speelt, is extraversie, waar we onderwerpen sociaal, assertief, spraakzaam en actief vinden. (Conti, Commodari & Buono, 2017). Verder, door de moeilijkheid om percepties te suren is het mogelijk dat kinderen in de huidige niveau van sociale robot over het algemeen vrij neutraal zijn ten aanzien van toekomstige interacties met educatieve robots (Reich-Stiebert, Eyssel & Hohnemann , 2019).
Kinderen rapporteren hogere contact intenties met educatieve robots in de 'hoge participatie'-conditie dan studenten in de' niet-participatie'-conditie. Dit suggereert dat de manipulatie van deelname aan het robotprototypeproces een positief effect heeft op de bereidheid van kinderen om met een educatieve robot te werken vooral bij diegene die niet bekend zijn met robots (Reich-Stiebert, Eyssel & Hohnemann, 2019) Het onderzoek naar de antecedenten en consequenties van dit gedrag verlangen en de verwachte emoties in het werken met een sociale robot kan bijdragen aan een beter begrip van de werknemers adoptie en geven signalen voor het ontwerpen van communicatie, onderwijs en beleid in verband met de verspreiding van sociale robots ( Piçarra & Giger, 2018).
1.4.3 De potentiële impact van de sociale robot op het kind
Sociale robotica kan hierbij als doel hebben: het meten van de kwaliteit en effectiviteit van de interactie in termen van uitkomst ofwel het meten van het betrokkenheidsniveau tijdens de sociale interactie tussen de robot en de mens. Zoals het geval is bij sociale interacties tussen mensen, zijn sociale interacties tussen mens en robot meestal complex en multimodaal (Lytridis , Bazinas & Papakostas, 2020). Autistische kinderen kunnen geleerde vaardigheden tijdens het spelen met de robot generaliseren naar de buitenwereld toe enzo kan de robot kan worden gebruikt als neuraal bemiddelaarstool voor de verrijking van de interactie tussen mens en kind. Sociale invloed is de mate waarin individuen denken dat ze de steun van anderen hebben bij het gebruik van een apparaat. Het beïnvloedt gebruiksintenties direct en indirect, zoals door de internalisering van andermans overtuigingen, hierbij speelt de sociale robot een drijfveer (Kossewska & Klosowska , 2020).
Silvera-Tawil, Roberts-Yates & Bradford (2018) zeggen daarbij dat gebruik van direct, realistisch en computergebasseerde omgevingen autistische kinderen helpen in dagelijkse taken, hiermee wordt hiermee wordt de kans op een beter individueel leven verhoogd. Volledig autonome robots kunnen zodanig gemodelleerd worden dat ze als gelijke van het kind invloed kan uitoefenen op het curiositeitsgedrag bij kinderen. Dusdanig dat het beïnvloed kind meer interesse zal tonen in sociale robots. Beïnvloeding van sociale interactie in uiting en expressie kan de curiositeit bij kinderen verhogen (Gordon, Breazeal & Engel, 2015).
Het sociaalgedrag en uit te voeren opdracht van de robot moet met alle voorzichtigheid worden ontworpen in lijn met de educatieve interactie waarin het zal worden ingezet. Daarbij rekeninghoudend met de gepersonaliseerd inhoud die individueel leren en interactie voorkeuren ondersteunt (Tony Belpaeme et al.,
15
2018). Als men er daarentegen voor kiest om een complexe taak te ontwerpen zoals in de huidige studie, zullen technische beperkingen in de huidige technologie in termen van perceptie er waarschijnlijk toe leiden dat een robot niet in staat is om de begeleiding te bieden die nodig is om het leren te vergemakkelijken. Dit zorgt steevast voor een impasse, waarbij de enige oplossing is om te wachten en te hopen dat robots op een dag voldoende intelligentie zullen bereiken om een dergelijke rol te spelen (Serholt, 2018). Sociale robots moeten in staat zijn om complexe en diverse sociale gedragingen te kunnen simuleren, deze kleine interacties zullen op termijn langetermijn relaties onderbouwen tussen kind en robot. Het creëren van expressieve robots in termen van robotacties is duidelijk mikpunt bij creatie, wat de robot zal zeggen of hoe hij zal bewegen en hoe de robot de communicatiepartner interpreteert op de robotwaarneming (Barakova et al., 2018).De robot ondersteunt onderwijs en heeft een positief effect op interactie en verhoogt de aandacht van studenten met autisme. Flexibele en bruikbare ontwerpen zorgen hierbij voor verbetering van cognitieve vaardigheden, zelfrespect en ruimtelijke intelligentie bij eenvoudige dagelijkse interacties. Waardoor ze sociale vaardigheden kunnen ontwikkelen (Özdemir, 2017). In educatieve spellen met robots wordt blikdetectie als een zeer belangrijk kenmerk beschouwd om de betrokkenheid te schatten. Blikrichting wordt voorgesteld als metriek in een selectiespel met een robot, waarin de robot de deelnemers de instructie geeft om één object te selecteren uit een groep beschikbare objecten. Onderzoekers observeerden de blik van de deelnemer tijdens het spelen of terwijl ze werden geïnstrueerd door de robot (Lytridis, Bazinas & Papakostas , 2020).Het is een duidelijk gegeven dat kinderen zich positief binden met sociale robots, jonge kinderen vernemen en reageren in verscheidene wegen op de verbale signalen van sociale robots inclusief back-channeling, aandachtig gedrag en stemgebruik. Dit is voornamelijk doordat kinderen emotionele status, mentale status, intenties en moraal verbinden aan sociale constructies van sociale robots (Williams, Park & Breazeal , 2019).
1.5 De ethische discussie in verband met de sociale robot
Bij de implementatie van de sociale robot is het ook belangrijk om alles in de lijn te doen van de ethiek. Hierbij weten we al wat een sociale robot is, wat het doel is van de sociale robot implementatie en wat de mogelijke connectie is met het kind. Het is van belang om de implementatie in lijn te doen met de menselijke wens. Hierbij een uiteenzetting van het ethische aspect dat samengaat met de implementatie van de sociale robot in het onderwijs.
De vooruitgang van de robotica is in de laatste jaren sneller aan het stijgen. Mensen maken zich lang zorgen over welke impact sociale robots kunnen hebben op de samenleving (Jones, 2018). Al enkele jaren worden de robots ook op nieuwe domeinen toegepast zoals onderwijs, zorg, entertainment en cultuur (Meghdari & Alemi, 2018, p. 78). Uit een onderzoek gericht op houding van 27 duizend Europese burgers over sociale robots, bleek dat 34% van de respondenten vinden dat sociale robots verboden moeten zijn in het onderwijs. 60% vindt dat sociale robots verboden moet zijn in zorg van kinderen en ouderen. Slechts 3% van de respondenten gaan akkoord met toepassen van de sociale robots in het onderwijs (Sharkey, 2016, p. 283). Hierdoor richten we ons in dit deel op de ethische problemen die ontstaan door het toepassen van de sociale robots in het onderwijs. Hiervoor hebben we de volgende zes artikels geraadpleegd die vooruitschoten in de literatuur rond dit onderwerp met de specifieke zoektocht naar de ethiek van de sociale robot implementatie. Namelijk: The crying shame of robot nannies, Should we welcome robot teachers?, Engineering Cheerful Robots: An Ethical Consideration, Robot ethics: Mapping the issues for a mechanized world, What happens when Robots Become Role Models en Recent Advances in Social & Cognitve Robotics and Imminent Ethical Challenges.
16
De volgende punten worden in deze zes artikelen aangehaald als ethische problemen die ontstaan bij het toepassen van de sociale robots in het onderwijs. Deze zijn privacy en veiligheid, bedrog, verantwoordelijkheid, psychologische schade, band met de sociale robot, zorgen bij de ouders en de ethische wetten. In de onderstaande tabel wordt aangehaald welke punten voorkomen in welk artikel.Studie
Auteur
P
ri
va
cy e
n
v
e
iligh
e
id
B
e
d
ro
g
V
e
ran
tw
o
o
rde
lijkhe
id
P
sych
o
lo
g
ische
sc
h
a
d
e
B
a
n
d
me
t
s
o
ciale
ro
b
o
t
Zo
rge
n
o
u
d
e
rs
E
th
ische
we
tt
e
n
The crying shame of
robot nannies
Noel Sharkey,
Amanda Jane
Sharkey(2010)
X X X XShould we welcome
robot teachers?
Amanda Jane
Sharkey(2016)
X X X X XEngineering Cheerful
Robots: An Ethical
Consideration
Raya A. Jones
(2018)
X XRobot ethics:
Mapping the issues
for a mechanized
world
Patrick Lin, Keith
Abney, George
Bekey(2011)
X X X
What happens when
Robots Become Role
Models
Jamie
Condliffe(2017)
x
XRecent Advances in
Social & Cognitve
Robotics and
Imminent Ethical
Challenges
Ali Meghdari, Minoo
Alemi(2018)
X X
Tabel 2: De ethische kwestie van de sociale robot
Na het raadplegen van deze artikelen en het ondervinden van de onderwerpen komen we tot de volgende onderverdeling:
1.5.1 De problematiek rondom privacy bij implementatie van de sociale robot
De sociale robots hebben het vermogen om de wereld om hen heen te voelen, te verwerken en vast te leggen. Dit is allemaal mogelijk door sensoren en algoritmen die de emoties en het uiterlijk van een individu kunnen herkennen (Lytridis C. Et al, 2019). Maar deze sensoren en algoritmen brengen op hun beurt veel vragen met zich mee over de privacy (Lin et al., 2011). Er is niets mis met een sociale robot die haar sensoren gebruikt om in interactie te treden met een individu zonder de bedoeling om de gegevens hiervan op te slaan Maar eens de sociale robot heel het proces van de interactie met het kind opneemt, opslaat en later analyseert kan dat tot bezorgdheid bij veel mensen leiden. Bijkomend zorgt het gebruik van sensoren en
17
algoritmen die mogelijk maken om de emotionele toestand van het kind te detecteren voor onrust (Jones, 2018). De sociale robots klasseren de gegevens van kinderen met wie zij in interactie treden en de vriendschapskringen van de kinderen in de klasomgeving. Dit is verontrustend en stelt Sharkey (2016) de vraag of het vergezocht is dat sociale robots deze informatie in de toekomst gebruiken om het gedrag van de kinderen in groepen te verdelen, een bestand bijhouden van de disruptieve gedragingen om de leerkrachten te alarmeren? Het vermelden aan de leerkrachten door de sociale robot dat de kinderen zich niet gedragen kan gevaarlijk zijn en wat te doen als de leerkrachten kunnen verwijzen naar de gegevens die het gedrag van het kind weergeeft? Is dit ethisch verantwoord om te verwerken? (Sharkey, 2016, p. 288). De Europese vormgeving heeft een oplossing op deze bezorgdheden namelijk de GDPR-wetgeving. De GDPR staat voor ‘General Data Proctection Regulation’. Met deze wetgeving probeert de Europese Unie de EU-burgers te beschermen tegen lekken van de persoonlijk informatie door bedrijven en organisaties. Indien de bedrijven en organisaties deze wetgeving niet volgen kan dit leiden tot fikse boetes. De boetes kunnen vier procent van de jaaromzet of tot maximum 20 miljoen euro bedragen (Verordening (EU) 2016/679).1.5.2 De band tussen het vertrouwen en het gedrag van het kind met de sociale robot
De band die kinderen met de sociale robot hebben is meer dan zomaar een knuffel. Een knuffel wordt bestuurd door de fantasie van het kind maar een sociale robot kan autonoom functioneren zonder de fantasie van het kind. Dit kan een beeld creëren voor het kind dat de sociale robot echt is en niet zelfsturend zoals een knuffel. Er is steeds meer bewijs dat kinderen geloven dat relatie met de sociale robot echt is (Sharkey & Sharkey, 2010). Verder blijkt dat de participanten de sociale robot als een leeftijdsgenoot/metgezel zien. Zowel de kleuters als de oudere kinderen beweerden dat ze bevriend kunnen zijn met de sociale robot en dat zij verdrietig zijn als de gezelschap van de sociale robot ontbreekt. De sociale robot wordt meer en meer als een levend wezen behandeld dan als een speelgoed door het kind. Verder kunnen kinderen ook met de sociale robots relaties aangaan (Serholt et al., 2016)
De kinderen zijn alsnog bereid om relaties met de sociale robots aan te gaan wanneer ze niet op de juiste manier reageerden op hun interacties. De kinderen proberen uitleg te geven hun gedrag aan de sociale robot waardoor er potentieel is op langdurige relatie met de sociale robot. Als de sociale robot bijvoorbeeld niet met hen sprak, legden kinderen uit dat dit kwam omdat het doof, ziek of te jong was om te begrijpen. Hun kijk op de sociale robots leek niet eens te veranderen toen de onderzoekers lieten zien dat ze geen levende wezen maar robots zijn ( Sharkey & Sharkey, 2010, p. 161-190).
1.5.3 Het effect op de ontwikkeling van het kind door de sociale robot
Hierdoor kunnen sociale robots effect hebben op de ontwikkeling van het kind. Sharkey & Sharkey (2010) beweren dat de ontwikkeling van de kinderen in de termen van het begrijpen, omgaan met de mensen en taalvaardigheden negatief aangetast kunnen worden. Dit kan ertoe leiden dat kinderen niet volledig empathisch en begripvol zijn tegenover een medemens (Serholt et al., 2016, p. 625). Bijkomend beweren Sharkey & Sharkey (2010) dat het vervangen van het individu door een sociale robot in de kinderopvang tot verwaarlozing van de kinderen door de ouders teweeg brengt. Dit kan leiden tot het ontwikkelen van hechtingsstoornissen bij de kinderen (Fridin, 2014, p.268). Bijvoorbeeld dat de kinderen liever met een sociale robot in interactie gaan dan met een mens (Serholt et al., 2016, p. 625). Verder kunnen de kinderen zodanig gehecht worden aan de aanwezigheid van de sociale robots dat bij de afwezigheid van de sociale robots de kinderen verdrietig kunnen worden. Omdat zij graag in interactie met de sociale robots treden en liever menselijke contact met leeftijdsgenoten en andere groepen van mensen vermijden. Zij kunnen eraan wennen om de sociale robots alles te laten doen en alles te vertellen. Dit leidt op zijn beurt tot een daling van de sociale vaardigheden van de kinderen (Sharkey, 2016, p. 284). Een ander voorbeeld van
18
een mogelijk effect op de ontwikkeling van het kind is het verhaal uit 2017 waar ouders klaagden dat hun kinderen onbeleefd werden door interactie met Alexa van Amazon. Want Alexa heeft geen ‘a.u.b.’ of ‘dank je wel’ nodig als de kinderen iets vragen aan Alexa (Condliffe, 2017).De sociale robots kunnen ook het vertrouwen van de kinderen beschadigen als kinderen bewust worden dat die sociale robots geprogrammeerde entiteiten zijn. Die even goed bevriend kunnen worden met elke kind van de klas. Deze relatie van het kind met de sociale robot kan invloed hebben op de opvattingen en het begrip van het kind over hoe relaties werken. Men zou denken dat de relatie dat een kind heeft met een sociale robot dezelfde is als met een knuffelbeer. Dit is echter niet zo want een sociale robot kan bewegen, emoties waarnemen en er gepast erop reageren. Een knuffelbeer kan dit niet. Als een kind met een knuffelbeer speelt dan beeld het kind zich alles in, terwijl een sociale robot de handelingen zelf kan uitvoeren. De volgende vraag waarmee wij zitten is naar wie de verantwoordelijkheid kan toegeschoven worden wanneer sociale robots fouten begaan (Sharkey, 2016, p. 284).
Daarnaast wordt de vraag gesteld door Riek & Howard (2014) wat er zou gebeuren als het onderzoek eindigt en de sociale robot weggaat bij de participanten. Volgens Riek en Howard kunnen participanten een sterke psychologisch en emotionele band ontwikkelen met de sociale robot. Het verbreken van het contact met de sociale robot na het onderzoek kan misschien meer schade teweegbrengen dan het voordeel dat het initieel had teweeg gebracht. Daarom moet elk onderzoek de risico’s en voordelen voor de participant voor beëindiging van onderzoek aanpakken (Riek & Howard, 2014, p. 5).
1.5.4 De agressie tegenover de sociale robot
Uit studies blijkt dat kinderen zich goed gedragen ten opzichte van de sociale robots in het bijzijn van hun ouders, Maar als de ouders eenmaal verdwenen zijn dat ze hun sociale robots mishandelen. Dit in vorm van slaan, schoppen en het deblokkeren van de sociale robot. Verder heeft de studie aangetoond dat als de sociale robots zachte stemtoon gebruiken ze minder effectief zijn in het vermijden van mishandelingen (Broadbent, 2017). De beste strategie die kon worden voorgelegd voor de sociale robot implementatie was volgens de auteurs om die agressieve kinderen te vermijden. Deze resultaten worden bevestigd door Sharkey, (2016). Ze beweren dat het voornamelijk jongens van zeven tot tien jaar oud zijn die agressie kunnen voortonen. Verder blijkt dat de boze expressie van de sociale robot voor vermindering van de mishandeling kan zorgen (Sharkey, 2016, p. 284; Broadbent, 2017).
1.5.5 De verantwoordelijkheid bij het omgaan met de sociale robot
De negatieve invloed van de sociale robots op de ontwikkeling en het gedrag van de kinderen wekken discussies op over wie verantwoordelijk moet worden gesteld. De fabrikant of de sociale robot? De fabrikant van de sociale robots kunnen de verantwoordelijkheid ontlopen door alle risico’s van de sociale robots te vermelden. Daarbovenop kan de fabrikant stellen dat de ontwikkeling van de sociale robots in lijn is met de industriestandaard. Verder kan de sociale robot zelfverantwoordelijk gesteld worden voor de fouten of neven effecten maar dit is niet zinvol. Want een sociale robot opsluiten of een boete geven heeft niet dezelfde invloed als een mens bestraffen. Hierdoor ontstaat er een kloof waarin noch de sociale robots noch de fabrikant verantwoordelijk gesteld kan worden (Serholt et al., 2016, p. 625). Dit is een punt waar de overheid veel aandacht moet aanbesteden als zij daadwerkelijk overgaat op het toepassen van de sociale robots in het onderwijs.
De sociale robots zijn niet altijd eerlijk of onbevooroordeeld. Dit komt omdat sociale robots door mensen worden ontwikkeld en geprogrammeerd. Hierdoor kunnen ze fouten maken die niet bedoeld zijn zoals de