ANALYSIS OF RUNNERS’
PREFERRED RUNNING VELOCITY
DURING RECREATIONAL 5 KM
RUNS
Aantal woorden: 25162
Drieghe Ewoud en Vercauteren Robbe
Studentennummer: 01508850 en 01507378 Promotor: Dr. Pieter Fiers
Masterproef voorgelegd voor het behalen van de graad master in de lichamelijke opvoeding en bewegingswetenschappen
Voorwoord
Als studenten Lichamelijke Opvoeding en Bewegingswetenschappen, beide met een voorliefde voor vakken als biomechanica en bewegingsanalyse, kozen we er voor om onze masterproef binnen het domein van de Biomechanica af te leggen. Ondanks de vele waarschuwingen omtrent de werklast die komt kijken bij een masterproef binnen het vakgebied, waren we beide vastberaden om het sluitstuk van onze vijfjarige opleiding tot een goed einde te brengen. Obstakels als COVID-19 konden onze vastberadenheid niet intomen om van onze masterproef alsnog een werk te maken die onze kennis, inzicht en toewijding weerspiegelt. Naast het vele schrijfwerk die de masterproef met zich meebracht, was het voor ons een unieke ervaring om ondergedompeld te worden in de onderzoekswereld, en in het bijzonder de onderzoekswereld van de biomechanica. Maar ook werken met programma’s als Excel en Spss werd een vanzelfsprekendheid voor ons.
Daarnaast willen we ook nog enkele personen bedanken die dit allemaal mogelijk maakten.
Eerst en vooral willen wij onze promotor en begeleider Dr. Pieter Fiers bedanken. Hij volgde ons werk steeds nauw op en stond steeds klaar om ons te helpen. Ook Em. Prof. Dr. Dirk De Clercq willen we graag bedanken om ons te laten proeven van de wondere wereld van de biomechanica en om ons de nodige kennis mee te geven om deze thesis te kunnen maken. Bedankt Pieter en Professor De Clercq!
Daarnaast willen we ook onze ouders bedanken, die door het Coronavirus langer met ons opgescheept zaten dan verwacht. Zij hebben ons alle mogelijkheden en kansen gegeven om 5 fantastische studentenjaren mee te maken. Mama en papa, Bedankt!
Ten slotte moeten we elkaar bedanken. Door het Coronavirus werd de knoop pas eind maart doorgehakt om een volledig nieuw onderzoek op te starten. Dit maakte het uiterst moeilijk om onze masterproef alsnog in eerste zit in te dienen. Samen zijn we een goed geoliede machine, waarbij we perfect op elkaar zijn ingespeeld en elkaar steeds motiveren. Hierdoor kunnen we toch met trots dit werk in eerste zit presenteren.
Aanpassingen omwille van het Coronavirus
2020 is gestart als een bewogen jaar. De maatregelen die werden getroffen om het Coronavirus tegen te houden, zijn van grote impact geweest op deze masterproef. Aangezien wij normaliter testen in het labo moesten afnemen verplichtten de maatregelen met betrekking tot COVID-19 ons om het labowerk te stoppen, en bijgevolg het onderzoek te staken.
Eind maart werd de knoop doorgehakt om de focus van ons onderzoek te verleggen, en dus onze onderzoeksmethode aan te passen. Dit titel van de oorspronkelijke masterproef is: ‘Metabolic cost of walking and running, are preferred locomotion speeds metabolically optimal?’. De focus in dit onderzoek lag op voorkeur loopsnelheid en metabool energieverbruik bij lopen. In omstandigheden waarbij we fysiek niet in contact kunnen komen met proefpersonen, is het niet haalbaar om het metabole energieverbruik te meten. Daarom besloten we om de focus te leggen op de voorkeur loopsnelheid, aangezien snelheid wel nog meetbaar is in de huidige omstandigheden. De voorbije twee maanden kregen proefpersonen instructies om in totaal vijf keer buiten te gaan lopen, op een zelfgekozen parcours. Hierbij verzamelden we zoveel mogelijk data over de verschillende loopsessies met behulp van Strava en vragenlijsten die werden ingevuld na de loopsessies.
Aangezien de literatuur van de oorspronkelijke masterproef nog steeds van toepassing is, laten we onze literatuurstudie staan in de nieuwe masterproef. De reeds uitgewerkte methode van het pre- corona deel van de masterproef, en het deel van de beperkt verzamelde resultaten voor de corona- epidemie voegen we samen toe als addendum aan deze masterproef (zie addendum 3).
Abstract
Voorkeur loopsnelheid is een weinig onderzocht onderwerp in vergelijking met voorkeur wandelsnelheid, en bijgevolg een niet goed afgebakend concept.
Doel: Het doel van deze studie is om het concept voorkeur loopsnelheid beter te definiëren.
Eerst werd de voorkeur loopsnelheid bij een 5km loopsessie bepaald bij sportieve gezonde proefpersonen. Daarnaast werd de variabiliteit van de voorkeur loopsnelheid van een loopsessie van 5 km geanalyseerd. Deze variabiliteit werd zowel binnen één sessie als tussen verschillende sessies onderzocht. Ten slotte werd de invloed van (instructie tot) lopen met een hogere pasfrequentie of met een grounded running patroon op de voorkeur loopsnelheid onderzocht.
Methode: Sportieve, gezonde proefpersonen liepen de eerste drie loopsessies, op een
zelfgekozen parcours van 5 km, aan voorkeur loopsnelheid. Tijdens de vierde en vijfde sessie liepen de proefpersonen op hetzelfde parcours aan voorkeurssnelheid, maar eens met verhoogde pasfrequentie en eens met een grounded running patroon. Proefpersonen liepen met Strava (gsm of wearable) om coördinaten te registreren. Uit de coördinaten werden snelheden tijdens de 5 loopsessies berekend. Proefpersonen vulden na elke sessie een vragenlijst in met betrekking tot determinanten van de voorkeur loopsnelheid.
Resultaten: Er is geen significant verschil in voorkeur loopsnelheid tussen de loopsessies waar
proefpersonen met een normaal patroon liepen. De eerste 20% van de run, werd gemiddeld 0,14 m/s sneller gelopen dan het middelste deel van de run. Ook bij het lopen met een verhoogde pasfrequentie en een grounded running patroon, werd de eerste 20% van de run significant sneller gelopen dan het middelste deel van de run. Er was geen significant verschil in voorkeur loopsnelheid wanneer proefpersonen met een verhoogde pasfrequentie liepen. Wanneer de proefpersonen hun normale looppatroon aanpasten naar een grounded running patroon, liepen de proefpersonen gemiddeld 0,15 m/s trager.
Conclusies: Wanneer sportieve, gezonde subjecten 5 km aan voorkeurssnelheid lopen, hebben
ze de neiging snel te starten. Deze snelheid daalt progressief tijdens het middelste deel van de loopsessie om uiteindelijk te versnellen tijdens het laatste deel. De voorkeur loopsnelheid varieert niet tussen verschillende sessies. De invloed van (instructie tot) lopen met verhoogde pasfrequentie op de voorkeur loopsnelheid is klein. Wanneer proefpersonen de instructie
krijgen om aan voorkeur loopsnelheid te lopen met een grounded running patroon, is de snelheid kleiner. Verder onderzoek naar de determinanten van de voorkeur loopsnelheid is noodzakelijk om het onderwerp voorkeur loopsnelheid nog beter te kunnen afbakenen.
Inhoudsopgave
VOORWOORDAANPASSINGEN OMWILLE VAN HET CORONAVIRUS ABSTRACT
INHOUDSOPGAVE
1. LITERATUURSTUDIE OORSPRONKELIJKE MASTERPROEF ... 1
1.1 HUMANE LOCOMOTIE ... 1
1.2 WANDELEN EN LOPEN ... 2
1.2.1 Onderscheid tussen wandelen en lopen ... 2
1.3 WANDELEN ... 4 1.3.1 Spatiotemporele kenmerken ... 4 1.3.2 Lichaamszwaartepunt en krachten ... 4 1.3.3 Kinematica ... 7 1.3.4 Kinetica ... 7 1.3.5 Metabole kost ... 9 1.4 LOPEN ... 11 1.4.1 Spatiotemporele kenmerken ... 11 1.4.2 Lichaamszwaartepunt en krachten ... 11 1.4.3 Kinematica ... 13 1.4.4 Kinetica ... 14 1.4.5 Metabole kost ... 16 1.4.6 Grounded running ... 19 1.5 VOORKEURSSNELHEID ... 21
1.5.1 Terminologie en bepaling van voorkeurssnelheid ... 21
1.5.2 Bepalen van voorkeurssnelheid bij wandelen ... 22
1.5.3 Determinanten van de voorkeur wandelsnelheid... 24
1.5.4 Voorkeurssnelheid van wandelen ... 24
1.5.5 Bepalen van de voorkeurssnelheid van lopen ... 25
1.5.6 Determinanten van de voorkeur loopsnelheid... 26
1.5.7 Voorkeurssnelheid van lopen ... 28
1.6.1 Metabole kost van wandelen aan voorkeurssnelheid ... 28
1.6.2 Metabole kost van lopen aan voorkeurssnelheid ... 29
1.7 PROBLEEMSTELLING ... 30
1.8 ONDERZOEKSVRAGEN EN HYPOTHESES... 31
1.8.1 ONDERZOEKSVRAAG 1:WELK LOOPBANDPROTOCOL SIMULEERT HET BEST OVERGRONDS LOPEN? ... 31
1.8.2 ONDERZOEKSVRAAG 2:IS ER EEN OPTIMUM IN ENERGIEVERBRUIK BIJ LOPEN? ... 31
2. LITERATUURSTUDIE NIEUWE MASTERPROEF ... 32
2.1 VOORKEUR LOOPSNELHEID ... 32
2.2 DETERMINANTEN VAN DE VOORKEUR LOOPSNELHEID ... 33
2.3 VERHOOGDE PASFREQUENTIE ... 35 2.3.1 Stapfrequentie (SF) en staplengte (SL) ... 35 2.3.2 Stapfrequentie en energieverbruik ... 35 2.3.3 Stapfrequentie en voorkeurssnelheid ... 36 2.4 GROUNDED RUNNING ... 37 2.5 PROBLEEMSTELLING ... 38 2.6 ONDERZOEKSVRAGEN EN HYPOTHESES... 39
2.6.1 Wat is de voorkeur loopsnelheid op een 5km run? ... 39
2.6.2 Wat is de invloed van lopen met een verhoogde pasfrequentie op de voorkeur loopsnelheid?.... 39
2.6.3 Wat is de invloed van grounded running op de voorkeur loopsnelheid? ... 40
3. METHODE ... 41 3.1 PROEFPERSONEN ... 41 3.2 PROCEDURE ... 42 3.2.1 Normale looppatroon ... 42 3.2.2 Verhoogde pasfrequentie ... 42 3.2.3 Grounded running... 42 3.3 INSTRUCTIE ... 43 3.3.1 Normale looppatroon ... 43 3.3.2 Verhoogde pasfrequentie ... 43 3.3.3 Grounded running... 43 3.4 METINGEN ... 45 3.5 DATA-ANALYSE ... 46 3.5.1 GPS-data ... 46
3.5.2 Vragenlijsten ... 48
3.5.3 SPM ... 49
3.5.4 Video’s ... 49
4. RESULTATEN ... 51
4.1 WAT IS DE VOORKEUR LOOPSNELHEID OP EEN 5KM RUN ... 51
4.1.1 Variabiliteit in voorkeur loopsnelheid tussen verschillende loopsessies ... 51
4.1.2 Variabiliteit in voorkeur loopsnelheid binnen eenzelfde loopsessie ... 52
4.1.3 Verschillen in voorkeur loopsnelheid ... 54
4.2 VERHOOGDE PASFREQUENTIE ... 58
4.2.1 Invloed van instructie om met hogere pasfrequentie te lopen op loopsnelheid ... 58
4.2.2 Invloed van verhoogde pasfrequentie op voorkeur loopsnelheid ... 58
4.2.3 Relatie tussen intentie tot verhogen pasfrequentie en effectief verhogen van de pasfrequentie . 59 4.3 GROUNDED RUNNING ... 60
4.3.1 Invloed van grounded running op voorkeur loopsnelheid ... 60
4.3.2 Relatie tussen voorkeur loopsnelheid en voorkeur grounded loopsnelheid ... 60
4.3.3 Getraindheid en invloed grounded lopen op voorkeur loopsnelheid ... 60
5. DISCUSSIE... 61
5.1 VOORKEUR LOOPSNELHEID ... 61
5.2 VARIABILITEIT IN VOORKEUR LOOPSNELHEID. ... 64
5.3 DETERMINANTEN VAN VOORKEUR LOOPSNELHEID... 66
5.4 VERHOOGDE PASFREQUENTIE ... 68
5.5 GROUNDED RUNNING ... 69
5.6 OVERIGE BEPERKINGEN ONDERZOEK... 70
BRONNENLIJST ... 72
ADDENDUM 1... 81
ADDENDUM 2: VRAGENLIJST ... 84
1
1. Literatuurstudie oorspronkelijke masterproef
1.1 Humane locomotie
Volgens het Vlaams Instituut Gezond Leven moet de Vlaming in functie van een gezonde levensstijl 10.000 stappen per dag zetten. Dit zijn meer dan drie miljoen stappen in een jaar. Een leven zonder wandelen of lopen is dan ook moeilijk in te beelden.
Levende wezens kunnen zich op heel wat verschillende manieren verplaatsen. De meeste zoogdieren op het land verplaatsen zich quadripedaal (= vier ledematen komen in contact met de grond om zich te verplaatsen). Het gaan bij de mens gebeurt echter bipedaal. Dit wil zeggen dat alleen de voeten in contact zijn met de grond, de handen niet. Deze bipedale vorm van locomotie is één van de eerste humane kenmerken die ons onderscheiden van onze voorouders aangezien die zich, net zoals de meeste zoogdieren, quadripedaal voortbewogen (Richmond et al., 2001).
Op basis van studies naar animale coördinatie tussen de verschillende ledematen werd een onderscheid gemaakt tussen twee patronen van locomotie: symmetrische en asymmetrische locomotie (Wetzel et al., 1976). Ook onze bipedale gang valt op te splitsen in deze twee patronen (Whitall & Caldwell, 1992).
Symmetrische locomotie houdt in dat de benen met constante opeenvolgende intervallen op de grond neerkomen: als het ene been zich in de helft van de cyclus bevindt, heeft het andere been de cyclus vervolledigd. Hierdoor is er een vast, alternerend patroon aanwezig tussen beide onderste ledematen (Whitall & Caldwell, 1992). Tot deze symmetrische vorm van locomotie behoren de twee meest gebruikte humane gangen: wandelen en lopen.
Bij asymmetrische locomotie is er tussen het neerkomen van beide benen geen constant opeenvolgend interval. Hierdoor is er geen alternerend patroon aanwezig tussen de onderste ledematen. Onder deze vorm van locomotie valt bilateraal huppelen en unilateraal huppelen, ook wel bipedale gallop genoemd. Dit zijn minder onderzochte vormen van locomotie bij de mens, omdat deze verplaatsingsmethoden geen voorkeur krijgen wanneer men zich in steady state wilt voortbewegen op een vlakke ondergrond (Fiers et al., 2013)(Whitall & Caldwell, 1992).
2
1.2 Wandelen en lopen
1.2.1 Onderscheid tussen wandelen en lopen 1.2.1.1 Criteria
De twee meest gebruikte vormen van locomotie bij de mens zijn wandelen en lopen. Er zijn vier criteria die lopen beschrijven. (1) De aanwezigheid van een vluchtfase waarbij er geen contact is tussen het lichaam en het oppervlak waarop men zich voortbeweegt; (2) Een curve van de verticale grondreactiekracht met één maximum, ter hoogte van het midden van de steunfase; (3) Maximale flexie t.h.v. de knie in het midden van de steunfase; (4) Het in fase zijn van kinetische en potentiële energie (Novacheck, 1998).
Toch wordt er niet altijd voldaan aan alle vier de criteria. Zo wordt grounded lopen in sommige gevallen geobserveerd bij mensen die heel traag lopen: bij deze locomotievorm is er geen vluchtfase maar wordt er wel voldaan aan de overige drie criteria om als lopen geclassificeerd te worden (Bonnaerens et al., 2018).
1.2.1.2 Snelheid van wandelen en lopen
De mens beweegt zich voort aan een uitgebreide range van snelheden, afhankelijk van het doel. Bij lage snelheden kiest de mens ervoor om te wandelen. Bij hogere snelheden kiest men om te lopen. De normale range van snelheden waarbij men kiest om te wandelen gaat tot snelheden van ongeveer 2 m.s-1. Wanneer er wordt gevraagd om spontaan te wandelen, bedraagt de
wandelsnelheid ongeveer 1.3 m/s (Sloot et al., 2014). Deze spontane wandelsnelheid is de ‘voorkeur wandelsnelheid’. Dit wordt later nog uitgebreid besproken. Echter wordt er soms ook trager of sneller gewandeld dan deze voorkeurssnelheid. Zo zal een persoon zonder tijdsdruk die aan het shoppen is trager wandelen dan iemand die zich moet haasten om de bus te halen. Sommige mensen kunnen ook aan uitzonderlijk hoge snelheden wandelen, zo behalen snelwandelaars snelheden tot 4 m/s op een wedstrijd. Hierbij moet wel worden vermeld dat snelwandelen een ander gangtype is dan gewoon wandelen (P.E. di Prampero, 1986).
Vanaf een snelheid van 2.0 m.s-1 schakelt men over van wandelen naar lopen. Het wereldrecord
van Usain Bolt op de 100m sprint geeft een goed beeld van de maximale loopsnelheid op vlakke ondergrond bij de mens. Hierbij werd een maximale snelheid van 12.42 m/s geregistreerd.
3
Wanneer men aan een zelfgekozen snelheid loopt, bedraagt deze snelheid ongeveer 2.74 – 3.75 m/s (Minetti et al., 2003) (Zamparo, Perini, Peano, & Di Prampero, 2001).
Het verschijnsel waarbij men overgaat van wandelen naar lopen is de walk-to-run (WTR) transitie. Het verschijnsel waarbij men overgaat van lopen naar wandelen is de run-to-walk (RTW) transitie. De snelheid waarbij men spontaan overschakelt van wandelen naar lopen en vice versa zijn de transitiesnelheden. Deze transitiesnelheid wordt bepaald door een ‘pool’ van determinanten (Segers, 2006). Één ervan is de metabole kost. Metabole kost wordt verder in de literatuurstudie uitgebreid besproken waardoor duidelijk zal worden dat energetische efficiëntie mede bepaalt aan welke snelheid men van wandelen naar lopen overschakelt en omgekeerd. Er zijn echter nog andere determinanten zoals de excentrische arbeid die de m. Tibialis anterior moet leveren om het neerklappen van de voet tegen te gaan (Segers, 2006). In deze literatuurstudie wordt er niet dieper op deze determinanten ingegaan.
4
1.3 Wandelen
1.3.1 Spatiotemporele kenmerken
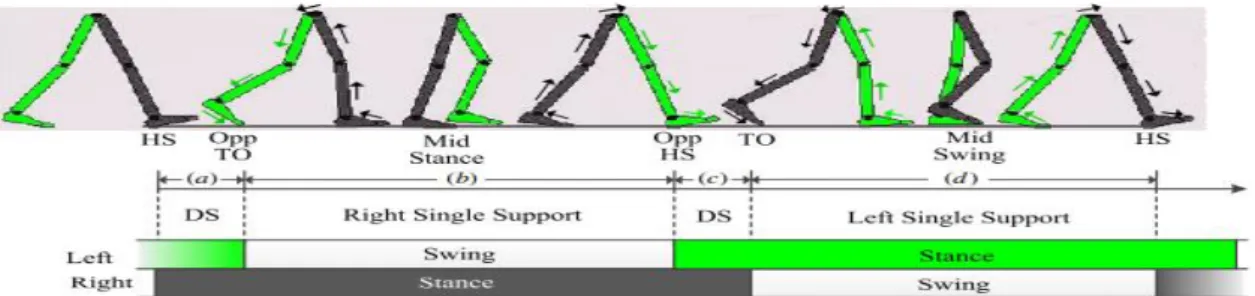
Elke wandelcyclus of schrede bestaat uit 2 stappen (Zatsiorky et al., 1994); (Fig. 1). Een cyclus of schrede begint wanneer één voet in contact komt met de grond en eindigt wanneer diezelfde voet opnieuw in contact komt met de grond. De steunfase eindigt wanneer de voet het contact met de grond verliest. Dit moment wordt aangeduid met ‘toe-off’ en betekent eveneens het begin van de zwaaifase (Novacheck, 1998).
Bij wandelen is de verhouding tussen de tijd dat één voet in contact is met de grond en de totale tijd van een schrede, genaamd de ‘duty factor’, altijd groter dan 50%. Hoe sneller men stapt, hoe kleiner deze wordt en vice versa (Novacheck, 1998). De wandelsnelheid is het product van de stapfrequentie en de staplengte (Zatsiorky et al., 1994). Als de stapfrequentie stijgt, daalt de duur van de dubbelsteunfase (Zacharov, M. S. Fruktov A. L. 1972). Wanneer de stapfrequentie zeer hoog is (180-220 stappen/ minuut) verdwijnt de dubbelsteunfase bijna volledig en gaat men over naar lopen (Zatsiorky et al., 1994). De minimale stapfrequentie waarbij er geen dubbelsteunfase meer aanwezig is en men van wandelen naar lopen overgaat, noemt men de kritische frequentie van wandelen (Zatsiorky et al., 1994).
1.3.2 Lichaamszwaartepunt en krachten
Binnen een wandelschrede kan het patroon van het lichaamszwaartepunt beschreven worden aan de hand van een punt in een wiel, dat niet het middelpunt is, die met constante snelheid over een vlakke ondergrond rolt (Carpentier et al., 2017). Tijdens het midden van de steunfase bereikt het lichaamszwaartepunt zijn hoogste punt, bij het begin en het einde van de steunfase bevindt het lichaamszwaartepunt zich op het laagste punt. Dit is het resultaat van het lichaam
Fig. 1: spatiotemporele kenmerken van wandelen. DS is dubbelsteunfase, HS eerste hielcontact (heel strike) en TO toe- off. (uit Meng & Zhang, 2012)
5
die kantelt over een relatief stijf steunbeen (Farley & Ferris, 1998). Dit kantelen van het lichaamszwaartepunt over het relatief stijve steunbeen wordt voorgesteld aan de hand van een
omgekeerd pendulummodel (Margaria, 1976). Hierbij beschrijft het LZP een boogvormige
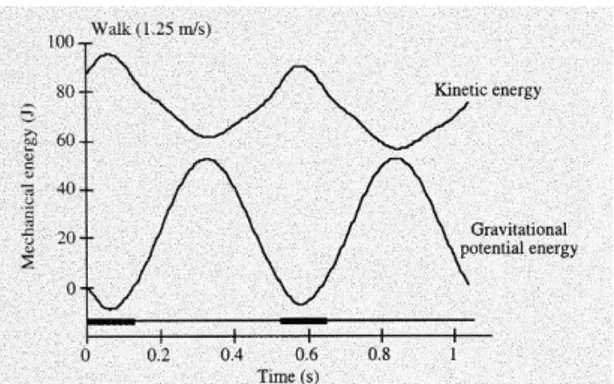
baan. In dit model is er een constante uitwisseling tussen kinetische en potentiële energie omdat deze uit fase zijn (fig. 2). Hierdoor is de mechanische efficiëntie zeer groot (Margaria, 1976). Het is de zwaartekracht (= mg) die het rotatiepunt van het pendulum, of beter gezegd de voet, op de grond houdt. De ratio tussen de zwaartekracht en centripedale kracht (mv²/L met v als horizontale snelheid en L als beenlengte) is het fraudegetal (=v²/gL) (R. M. Alexander, 1989). Volgens dit model komt een fraudegetal van 1 overeen met de grootst mogelijke wandelsnelheid. Wanneer dit getal groter is dan 1 wordt contact met de grond verloren en ontstaat er een zweeffase.
Kinetische energie is de inertiekracht die wordt aangegeven door de snelheid en massa van een individu in de stapcyclus (Cavagna & Margaria, 1966). De potentiële energie van het lichaam is afhankelijk van de hoogte van het lichaamszwaartepunt tijdens de stapcyclus aangezien de lichaamsmassa constant blijft.
Het energieniveau van het lichaam is de som van deze potentiële en kinetische energie. Aangezien het LZP zich op het hoogste punt bevindt tijdens de helft van de steunfase, is er daar het meeste potentiële energie aanwezig. Op hetzelfde moment is er een minimale kinetische energie, dit door afremming in de eerste helft van de steunfase ten gevolge van de negatieve horizontale GRK. In het tweede deel van de steunfase stijgt de kinetische energie van het LZP opnieuw, dit dankzij het versnellende effect van de horizontale GRK. Op het einde van de
Fig. 2: Kinetische energie en gravitationele potentiële energie bij wandelen aan 1.25 m/s. De zwarte balken onderaan geven dubbelsteunfasen weer. (uit Farley & Ferris, 1998)
6
steunfase is de kinetische energie maximaal en de potentiële energie minimaal aangezien het LZP zich op de laagste positie uit de volledige cyclus bevindt (Farley & Ferris, 1998). Bij een geïdealiseerde omgekeerde pendulum is er 100% teruggave van mechanische energie bij het uitvoeren van één pendulumbeweging door uitwisseling tussen Epot en Ekin.
Bij humaan wandelen bedraagt dit 60-70%. Eén van de redenen hiervoor is dat de benen zich niet gedragen als starre structuren bij het uitvoeren van een pendulumbeweging (Cavagna et al., 1976).
Aangezien er steeds minstens één voet in contact is met de grond, wordt er op elk moment tijdens een schrede een kracht op de grond uitgeoefend (Farley & Ferris, 1998).
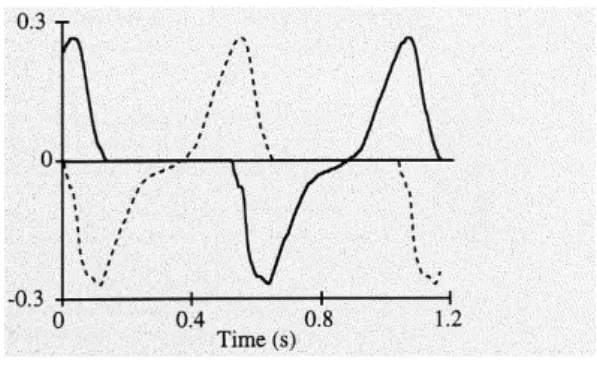
Fig. 3 geeft de verticale GRK weer in aantal keer lichaamsgewicht bij wandelen aan een snelheid van 1.25m/s. Bij de steunfase van één stap zijn er twee maxima. Het eerste maximum komt voor bij het neerkomen van de voet om de neerwaartse beweging van het lichaamszwaartepunt tegen te gaan. Hierna neemt de verticale GRK af omdat de opwaartse versnelling vermindert. Ten slotte stijgt de verticale grondreactiekracht tot een tweede maximum bij het afduwen van de voet op de grond. Fig. 4 geeft de horizontale GRK in aantal keer lichaamsgewicht weer bij wandelen aan een snelheid van 1.25m/s. In de eerste helft remt het lichaam af door een negatieve en dus achterwaarts gerichte horizontale GRK. In de tweede helft van de steunfase versnelt het lichaam door een positieve, voorwaarts gerichte horizontale GRK (Farley & Ferris, 1998).
Fig. 3: de verticale GRK bij wandelen aan 1.25
m/s i.f.v. de tijd. De volle lijn geeft de standfase van de linkervoet weer, de stippenlijn die van de rechtervoet. Verticale GRK is uitgedrukt in aantal keer lichaamsgewicht. (uit Farley & Ferris, 1998).
Fig. 4: de horizontale GRK bij wandelen aan 1.25 m/s i.f.v. de tijd. De volle lijn geeft de standfase van de linkervoet weer, de stippenlijn die van de rechtervoet. Verticale GRK is uitgedrukt in aantal keer
7 1.3.3 Kinematica
Gewrichtskinematica van de enkel, knie en heup wordt weergegeven in fig. 5 (Moortgat, 2012). Bij initieel voetcontact treedt er eerst plantairflexie op, snel opgevolgd door een dorsiflexie-beweging van de enkel. Ongeveer in de helft van de steunfase komt de voet in dorsiflexie. Na 2/3 van de steunfase wordt er opnieuw een plantairflexie-beweging ingezet. In de knie is er na initieel voetcontact eerst een buigende beweging, gevolgd door een korte strekkende beweging die op zijn beurt wordt gevolgd door een buigende beweging tot de knie ongeveer in 40° flexie is. In de heup is er na contact een lange strekkende fase, die net voor toe-off overgaat in een buigende fase (Lay et al., 2006).
1.3.4 Kinetica
Gewrichtsmomenten en -vermogens in het sagittale vlak van het enkel-, knie- en heupgewricht worden weergegeven in respectievelijk fig. 6 en fig. 7.
Ter hoogte van het heupgewricht is er in het sagittale vlak meteen na initieel voetcontact een strekkend moment om torsobeweging en het neerkomen van het been te controleren, al neemt dit strekkend moment af. Na ongeveer 40% van de schrede gaat dit moment over in een buigend moment, opnieuw nodig om het relatief zware bovenlichaam te stabiliseren. De vermogensgrafiek van de heup geeft aan dat dit strekkend moment vanaf initieel voetcontact tot ongeveer 40% van de schrede concentrische arbeid is, geleverd door de heupextensoren. Halverwege het flexiemoment zijn de heupstrekkers actief, op dat moment wordt er energie door deze heupstrekkers geabsorbeerd (werken excentrisch). Tijdens het laatste deel van de
Fig. 5: kinematica van enkel, knie en heup bij wandelen (uit Moortgat, 2012). P- flexion is plantairflexie.
8
schrede is er een strekkend moment in de heup die de zwaai van het been bevordert (Eng & Winter, 1995).
In het kniegewricht is er na landing eerst een flexiemoment, dit is het resultaat van een minimale actie van de flexoren bij hielcontact om er zeker van te zijn dat de knie in gebogen positie is om de impactkracht te absorberen. Dit gaat gepaard met een excentrische werking van de knie-extensoren die hierdoor energie absorberen om vervolgens in het tweede deel van de steunfase een strekkend moment te genereren (Eng & Winter, 1995).
In de enkel treedt er kort na het initiële voetcontact een dorsiflexie-moment op waarbij de dorsiflexoren excentrisch werken met als doel het neerklappen van de voet tegen te gaan (Eng & Winter, 1995). Hierna is er al snel een plantairflexie-moment in de enkel die progressief toeneemt tot +- 1.7 Nm.kg-1. Dit maximum wordt bereikt op ongeveer 5% van de schredetijd
van de toe-off. Hierna neemt het plantairflexie-moment af (Eng & Winter, 1995). De vermogensgrafiek van de enkel toont dat er slechts minimale energie-absorptie is bij wandelen t.h.v. de enkel. Net voor push-off worden er grote hoeveelheden concentrische arbeid geleverd om een snelle push-off waar te maken (Eng & Winter, 1995).
Fig. 6: Gewrichtsmomenten (N.m /kg) in de heup, knie en enkel bij wandelen. (uit Eng & Winter, 1995)
Fig. 7: Gewrichtsvermogens (W/ kg) van de heup, knie en enkel bij wandelen. Boven de horizontale lijn is generatie, onder de lijn is absorptie. (uit Eng & Winter, 1995).
9 1.3.5 Metabole kost
Metabool energieverbruik is de metabole energie die men verbruikt per tijdseenheid om een
eenheid lichaamsgewicht of massa te verplaatsen. Het metabole energieverbruik kan worden bepaald uit het zuurstofverbruik en de koolstofdioxide- en stikstofproductie. (Brockway, 1987). Hieruit kan de metabole kost van transport worden afgeleid. Dit is de totale metabole energie die nodig is om het lichaamsgewicht of -massa te verplaatsen over een bepaalde afstand (R. M. Alexander, 1989).
Netto metabool energieverbruik is het totale verbruik bij het uitvoeren van een taak min het
metabolisme nodig om recht te staan. Deze maat geeft een beter beeld van de metabole kost van de taak zelf.
Eerder werd vastgesteld dat in de steunfase slechts 60-70% van mechanische energie in het omgekeerde pendulummodel wordt teruggegeven. Om de overige mechanische energie te leveren moet er dus metabole energie geleverd worden. Waarvoor nog energie moet worden toegevoerd, wordt in volgende alinea’s uitgelegd.
Fig. 8 geeft weer uit wat de totale metabole kost van wandelen bestaat. Het is de som van de overgangskost van stap-tot-stap, de kost voor de beenzwaai, de kost voor het ondersteunen van het lichaamsgewicht en overige kosten zoals armzwaai en actieve stabilisatie. Hieronder worden deze kosten kort besproken.
De eerste belangrijke determinant is de mechanische arbeid nodig om de transitie van stap-tot-stap te maken. Bij het initiëren van een nieuwe stap-tot-stap wordt er negatieve arbeid verricht bij het plaatsen van de voet op de grond. Een combinatie van absorptie en generatie van energie zendt het lichaamszwaartepunt naar een nieuwe pendulumboog. Om dit energieverlies te compenseren, moet er positieve arbeid worden verricht (Donelan, Kram, & Kuo, 2002). De ratio van mechanische arbeid gerelateerd aan de overgang tussen de stappen stijgt bij constante stapfrequentie met staplengte tot de vierde macht. Hetzelfde geldt voor de metabole kost. Dus
10
hoe groter de staplengte, hoe meer geleverde mechanische arbeid en dus hoe meer metabole energie moet worden geleverd (Donelan et al., 2002)
Toch is dit niet de enige metabole kost verricht bij wandelen, anders zou men stappen met zeer kleine staplengte en hoge stapfrequentie. Bij wandelen geeft men de voorkeur aan een bepaalde staplengte in combinatie met een bepaalde stapfrequentie.
Dit komt hoogstwaarschijnlijk omdat er een compromis moet worden gevonden tussen de kost gerelateerd aan de overgang tussen de stappen en de kost gerelateerd aan het laten stijgen van de stapfrequentie, zoals het voor- en achterwaarts bewegen van de benen (Donelan et al., 2002). Inschattingen van de totale kost van zwaaien van de benen en dus het initiëren en propageren van de beenzwaai bij stappen variëren tussen 10-33% (Gottschall & Kram, 2005) (Doke et al., 2005). Een hogere stapfrequentie bij eenzelfde snelheid resulteert in een grotere kost van de dubbelsteunfases, een lagere kost van het zwaaien van de benen en geen verschil in kost van de enkelsteunfases. (Umberger, 2010). Daarnaast vonden Margaria et al. dat de energiekost bij wandelen in grote mate afhankelijk is van het gewicht. Wanneer men het metabole energieverbruik per kg LG uitzet in functie van de snelheid, ziet men een patroon: een progressief stijgende curve (Margaria, 1976); (Fig. 9).
Het aantal kcal.kg-1.m-1 (metabole kost per kg LG) in functie van de snelheid is een U- vormige
curve. Het minimum van deze curve bevindt zich rond 1.3 m.s-1 waar men ongeveer 0.5 kcal.kg -1.m-1 verbruikt. Dit is het metabole optimum van wandelen: de wandelsnelheid waarbij men het
minst verbruikt per kilometer. Als men trager of sneller wandelt dan dit metabole optimum zal er een hoger energieverbruik worden vastgesteld (Zarrugh et al., 1974) (Margaria, 1976) (P.E. di Prampero, 1986).
Fig. 9: Metabole kost (J/m) van wandelen en lopen in functie van de snelheid (m/s). (uit Novacheck, 1998)
11
1.4 Lopen
1.4.1 Spatiotemporele kenmerken
Bij lopen gebeurt toe-off nog voor de helft van een gangcyclus vervolledigd is. Er zijn dus geen dubbelsteunfasen aanwezig. De timing van toe-off is afhankelijk van de snelheid waaraan men loopt. Hoe sneller men loopt, hoe eerder de toe-off plaatsvindt. Men heeft dus een kleinere duty factor wanneer men aan een hogere snelheid loopt.
1.4.2 Lichaamszwaartepunt en krachten
Net zoals bij wandelen, gaat het lichaamszwaartepunt tijdens het lopen op en neer. Wanneer men in de vluchtfase zit, zal het lichaamszwaartepunt zich op de relatief hoogste positie bevinden. Tijdens de steunfase zal dit zwaartepunt dan weer relatief lager liggen. Volgend patroon is te herkennen: een ‘kaatsende’ fase gevolgd door een vluchtfase. Tijdens deze ‘kaatsende’ fase heeft slechts één voet contact met de grond. Vanaf het moment dat de voet in contact komt met de grond krijgt het lichaamszwaartepunt een opwaartse versnelling. Deze versnelling remt de neerwaartse beweging van het lichaamszwaartepunt om vervolgens opwaartse snelheid te genereren om terug af te stoten. Lopen wordt voorgesteld aan de hand van een massa-veer model (Blickhan, 1989); (fig. 10). In dit model slaan de spieren en pezen in de excentrische fase elastische energie op. Deze energie wordt omgezet in kinetische energie om een push-off uit te voeren. Dit model verklaart waarom lopen mechanisch toch efficiënt is (Blickhan, 1989) ondanks een zeer geringe uitwisseling van kinetische energie met potentiële energie (Farley & Ferris, 1998); (fig. 11). In fig. 10 wordt de baan van het LZP weergegeven.
Fig. 10: Massa-veer model.(uit Farley & Ferris, 1998) Fig. 11: kinetische energie (J) en potentiële energie (J) bij wandelen aan 1.25 m/s. (uit Farley & Ferris, 1998)
12
Hierbij is er in het midden van de steunfase een relatief grote flexie in de knie waardoor potentiële energie er het laagst is. Bij hielcontact en toe-off is het LZP dan weer op het hoogste punt van de steunfase.
In tegenstelling tot de gravitationele potentiële energie, is het patroon voor de kinetische energie gelijkaardig aan dat van wandelen. In beide gevallen bereikt de kinetische energie van het lichaamszwaartepunt een minimum in het midden van de steunfase. Tijdens de eerste helft van de steunfase is er een daling in verticale kinetische energie aangezien de grondreactiekracht het lichaamszwaartepunt doet vertragen. Tijdens de tweede helft van de steunfase is te zien dat de horizontale grondreactiekracht het lichaam laat versnellen, er is dus een stijging in kinetische energie. Desondanks dat het patroon van de kinetische energie bij wandelen en lopen zeer gelijkaardig is, is de amplitude bij lopen veel groter.
De verticale GRK bij hiellopers bestaat uit 2 pieken: eerst een impactpiek ten gevolge van het neerkomen van de voet op de grond, en vervolgens een actieve piek ten gevolge van de opwaartse acceleratie van het lichaam om af te stoten. Het patroon voor de horizontale grondreactiekracht is gelijkaardig aan het patroon bij wandelen. In het eerste deel van de steunfase is er een negatieve horizontale grondreactiekracht waarbij de persoon horizontaal wordt afgeremd. In het tweede deel van de steunfase is er een positieve horizontale grondreactiekracht die ervoor zorgt dat de persoon voorwaarts versnelt (Farley & Ferris, 1998).
13 1.4.3 Kinematica
In de meeste gevallen is er initieel contact met de hiel bij het lopen van grotere afstanden (Kasmer et al., 2013). Door de houding van het onderbeen is er een dorsiflexie nodig die zorgt voor initieel hielcontact. Deze dorsiflexie is bij hiellopers meer uitgesproken dan bij mid- en voorvoetlopers. Na de dorsiflexie volgt een plantairflexie tot toe-off tijdens de generatiefase,
waarin er dus kracht wordt geleverd om de enkel te strekken (Novacheck, 1998); (fig. 12). Bij lopen is er meer flexie in het kniegewricht dan bij wandelen, waardoor het LZP lager komt te liggen tijdens de steunfase. De kniebewegingen in het sagittale vlak bij wandelen, lopen en sprinten zijn zeer gelijkaardig, het verschil ligt vooral in de amplitude. Zo heeft men bij lopen ongeveer 45° knieflexie tijdens de absorptiefase die opgevolgd wordt door kniestrekking tot 25° in de propulsiefase. Daarnaast wordt tijdens de zwaaifase een knieflexie van 90° bereikt. Bij wandelen zullen deze waarden telkens heel wat kleiner zijn en gepaard gaan met een andere timing (Novacheck, 1998); (fig. 12).
Fig.12: kinematica van de enkel (a), knie (b) en heup (c) bij 4 verschillende snelheden.
Dorsi- en plantairflexie is de relatieve positie van de voet t.o.v. de tibia met een 90° hoek geplot op 0°. Knieflexie en extensie geeft de relatieve positie van de tibia t.o.v. de femur weer. Hier komt een volledig gestrekt been (180°) overeen met 0°. De positie van de dij geeft de relatieve positie van de femur t.o.v. de verticale weer. Een 0° positie, geeft aan dat de dij in verticale positie is. (uit Novacheck, 1998).
14
Ook in de heup is een zeer gelijkaardig patroon te zien bij lopen en wandelen. Het patroon kan vergeleken worden met een sinusfunctie. Bij initieel contact is de heup in ongeveer 70° flexie, dit wordt meteen opgevolgd door een strekkende beweging zodat de grondreactiekracht posterieur gericht is. Om dit mogelijk te maken, wordt er reeds een heupextensiebeweging ingezet tijdens het tweede deel van de zwaaifase. De maximale strekking in de heup is te zien net voor toe-off. De maximale heupflexie vindt plaats tijdens van het midden tot het laatste deel van de zwaaifase (Novacheck, 1998); (fig. 12).
1.4.4 Kinetica
De gewrichtsmomenten en gewrichtsvermogens worden weergegeven in fig. 13.
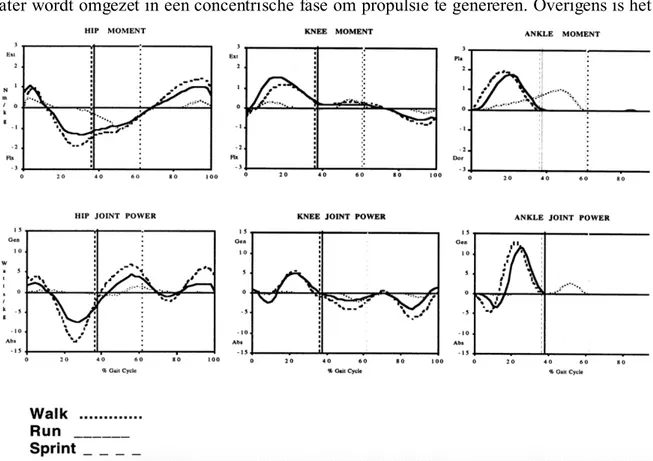
Het moment in de enkel tijdens lopen en wandelen verloopt gelijkaardig. Na initieel hielcontact werken de dorsiflexoren excentrisch om het neerklappen van de voet te controleren. Vervolgens genereren de plantairflexoren een plantairflexiemoment bestaande uit een excentrische fase die later wordt omgezet in een concentrische fase om propulsie te genereren. Overigens is het zo
Fig. 13: Gewrichtsmomenten (Nm/ kg) - en vermogens (W/kg) in de heup, knie en enkel bij wandelen, lopen en sprinten. Resultaten zijn genormaliseerd door te delen door het lichaamsgewicht. De toe- off lijn wordt weergegeven in eenzelfde lijnstijl als de gebruikte vorm van locomotie. (uit Novacheck, 1998)
15
dat het vermogen dat de enkel genereert, direct gerelateerd is aan de snelheid van het subject (Novacheck, 1998).
Net na het initiële voetcontact, werken ook de kniestrekkers excentrisch om de schok van de landing te absorberen. In de tweede helft van de steunfase contraheren de quadriceps concentrischals dominante kniestrekker, om vermogen te genereren waardoor de knie wordt gestrekt. Tijdens de zwaaifase is er weinig productie van vermogen, maar eerder absorptie van vermogen. In het begin van de zwaaifase werkt de rectus femoris excentrisch om excessieve knieflexie te voorkomen. Op het einde van de zwaaifase werken op hun beurt de hamstrings excentrisch om hyperextensie van de knie te voorkomen (Novacheck, 1998).
Ook in het heupgewricht verloopt het moment gelijkaardig bij wandelen, lopen en sprinten. Net voor en na initieel contact zijn de heupextensoren dominant. In het tweede deel van de steunfase tot en met het eerste deel van de zwaaifase zijn de heupflexoren dominant . Net voor het initiële contact contraheren de extensoren concentrisch om de heup in extensie te brengen en klaar te maken voor het eerste contact. Ze blijven vermogen genereren gedurende de gehele eerste helft van de steunfase. Hierna remmen de heupflexoren deze strekkende beweging af. Hierbij absorberen de flexoren energie om de heup klaar te maken voor de zwaaifase. Hierbij is de m. Psoas op volledige rek gekomen en wordt de spier in staat gesteld om de geabsorbeerde energie terug te geven bij toe-off (Novacheck, 1998).
16 1.4.5 Metabole kost
1.4.5.1 Algemeen
Over metabole kost bij lopen is er nog redelijk wat verdeeldheid. Oudere studies spreken over een lineaire functie wanneer men het metabole energieverbruik uitzet in functie van de snelheid. Hierbij loopt men, op vlak van metabole kost, aan elke loopsnelheid even efficiënt. Volgens deze studies bestaat er dus, in tegenstelling tot bij wandelen, geen optimale loopsnelheid. In 2009 komen Streudel Numers en Wall Sheffler tot de conclusie dat wanneer het metabole energieverbruik wordt uitgezet in functie van de snelheid, men geen lineaire functie maar een curvilineaire functie bekomt. Hierbij zou er dus wel een metabool optimale loopsnelheid zijn: een snelheid waarbij lopen significant minder kostelijk is dan aan andere snelheden. (Steudel-Numbers & Wall-Scheffler, 2009a). Vanaf dan zijn er nog enkele studies die tot de conclusie komen dat er wel degelijk een metabool optimale loopsnelheid is. Deze studies worden besproken bij 1.3.1.3.
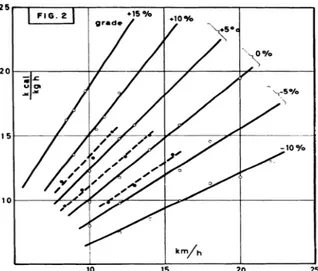
1.4.5.2 Lineaire metabole kost in functie van de loopsnelheid
Oudere studies vonden een lineaire verhouding tussen het metabool energieverbruik en loopsnelheid (Bramble & Lieberman, 2004) (Margaria et al., 1963a) (Carrier, 1984) (Menier & Pugh, 1968). Deze lineaire verhouding wordt weergegeven in figuur 14 (Margaria et al., 1963a). Aangezien de metabole kost per kg LG dan constant is, en onafhankelijk van de loopsnelheid, is er eenzelfde metabole kost voor alle loopsnelheden. Deze energiekost voor lopen op een horizontaal oppervlak is ongeveer 1kcal/km/ kg (Margaria et al., 1963a). Dit is dubbel zoveel als dat voor wandelen aan de meest optimale snelheid (1,11 m/s) (Margaria, Cerretelli, Aghemo, & Sassi, 1963).
17
1.4.5.3 Niet- lineaire metabole kost in functie van de loopsnelheid
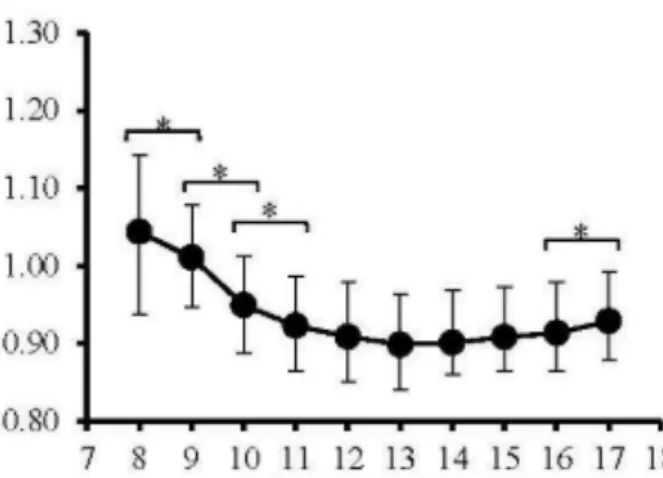
Meer recent onderzoek wijst aan dat de metabole kost en loopsnelheid zich curvilineair verhouden ten opzichte van elkaar zoals in figuur 15 (Black et al., 2018). Er zou dus wel een metabool optimale snelheid zijn bij lopen, net zoals bij wandelen. (Rathkey & Wall-Scheffler, 2017a)(Batliner et al., 2018)(Willcockson & Wall-scheffler, 2012)(Steudel-Numbers et al., 2007)(Shaw et al., 2013)(Fletcher et al., 2009)(Steudel-Numbers & Wall-Scheffler, 2009b). Volgens deze studies is het lineaire verband ,gevonden in eerdere studies, te wijten aan te kleine samples, te weinig geteste snelheden en te kleine ranges van geteste snelheden.
Ten slotte werd het verklaren van de variantie met behulp van lineaire modellen niet vergeleken met het verklaren a.d.h.v. curvilineaire modellen (Steudel-Numbers & Wall-Scheffler, 2009a) (Rathkey & Wall-Scheffler, 2017a). De energiekost zou voor lopen op een horizontaal oppervlak zou variëren tussen ongeveer 1,2 kcal/kg.km aan de minst economische snelheid (+- 2,22 m/s) tot 0,9 kcal/kg.km aan de meest economische snelheid (+- 3,61 m/s) (Black et al., 2018).
Fig. 14: Het metabool energieverbruik (kcal/ kg.h) van atleten (volle lijnen) en niet- atleten ( stippenlijnen) bij verschillende hellingsgraden uitgezet i.f.v. de snelheid (km/ h). (uit Margaria et al., 1963).
18
Fig. 15: De metabole kost (kcal/ kg.km)van recreatieve lopers aan verschillende snelheden (km/ h) uit (Black et al., 2018).
1.4.5.3.1 De invloed van getraindheid bij het niet lineaire model
Black et al onderzochten hoe Getraindheid de U- vormige curves bij lopen beïnvloeden door de metabole kost aan eenzelfde snelheden te vergelijken tussen goed getrainde lopers en recreatieve lopers. Bij de goed getrainde lopers werd een metabool optimale loopsnelheid gevonden rond 3,61 m/s. Aan deze snelheid liepen de goed getrainde lopers 14% meer economisch dan aan 2,22 m/s en 3% meer economisch dan aan 4,72 m/s. Voor iedere snelheid trager dan 3,06 m/s steeg de metabole kost. Tussen 3,06 m/s en 4,44 m/s vond men een plateau en tussen 4,44 m/s en 4,72 m/s steeg de metabole kost dan weer significant.
Bij de recreatieve lopers werd er niet één metabool optimale snelheid gevonden, maar wel een daling in energetische kost bij elke stijging in snelheid tussen 2,22 m/s en 3,33 m/s.
De metabole kost aan de meest metabool optimale snelheid was lager bij de getrainde lopers (0.97 kcal/kg/km) tegenover de metabole kost bij de recreatieve lopers (1.06 kcal/kg/km). Getraindheid bepaalt dus in zekere mate ook de metabole kost bij lopen. (Black et al., 2018). Ook Batliner et al vonden verschillen in metabole kost afhankelijk van de getraindheid. Gemiddelde lopers hadden een verhoogde metabole kost aan lage loopsnelheden 1.78–2.46 m/s in vergelijking met gemiddelde loopsnelheden 2.68 – 3.58 m/s. Bij die gemiddelde snelheden was de metabole kost onafhankelijk van de loopsnelheid, en steeg het metabool energieverbruik dus lineair met stijgende loopsnelheid. Anders dan bij de gemiddelde lopers, is er bij de sub-elite lopers wel een curvilineaire relatie tussen de snelheid en de metabole kost zoals beschreven
19
in 1.3.1.3. De metabole kost was dus zowel bij trage- en snelle loopsnelheden gestegen in vergelijking met de gemiddelde loopsnelheden.
Naast het verschil in curves, verschilt ook het absolute verschil in verbruik bij dezelfde loopsnelheden tussen beide groepen. De minder getrainde groep had een hogere metabole kost aan alle loopsnelheden dan de goed getrainde groep (Batliner et al., 2018). Goed getrainde lopers vertonen dus een betere loopeconomie dan minder getrainde lopers. Geslacht beïnvloedt metabole kost niet (Black et al).
1.4.6 Grounded running
Grounded running (Bonnaerens et al., 2018) is een specifieke vorm van lopen waarbij er geen vluchtfase aanwezig is. Bij grounded running is er net als bij lopen sprake van energie opslag en teruggave volgens het massa-veer model. Naast het ontbreken van de vluchtfase, wordt wel voldaan aan de overige drie criteria van lopen.
‘Grounded running’ wordt dus gedefinieerd als lopen waarbij er op elk moment minstens één voet in contact is met de grond.
Grounded lopen wordt geobserveerd bij recreatieve lopers die aan zeer lage snelheden lopen. Zo observeerden Shorten et al. (2017) dat 16% van de deelnemers van de Portland Marathon aan grounded lopen deed. 50% van deze grounded lopers liep wel tussen 5.5 en 8.0 km/h, wat bevestigt dat grounded lopen vooral gebeurt bij traag lopen (Shorten et al., 2017).
Wanneer personen de instructie krijgen om grounded te lopen is de duty factor 23.3% hoger bij aan 2.10 m/s dan bij traag lopen met een vluchtfase. Verder is de steuntijd 21.9% langer en
de duur van de zwaaifase 15.6% korter bij grounded lopen (Bonnaerens et al., 2018). In tabel 1 worden de parameters van musculoskeletale belasting weergegeven voor grounded
Tabel 1: Parameters van musculoskeletale belasting bij grounded running aan 2.10 m/s (GR), slow aerial running aan 2.10 m/s (SAR) en population average running aan 3.20 m/s(PAR). (Uit Bonnaerens et al., 2018)
20
lopen aan 2.10 m/s, traag lopen met vluchtfase aan 2.10 m/s en lopen aan gemiddelde snelheid (3.20 m/s).
Grounded lopen gaat gepaard met een lage musculoskeletale belasting waardoor de kans op het optreden van blessures mogelijks lager is dan bij lopen mét vluchtfase (Bonnaerens et al., 2018). Wanneer personen die gewoon zijn om met een vluchtfase te lopen, opgelegd worden om grounded te lopen, verbruiken ze 5% meer energie (Bonnaerens et al., 2018).
Op basis van deze waarden kan grounded lopen dus worden gezien als een matige tot zware vorm van fysieke activiteit met lagere musculoskeletale belasting en dus mogelijks een lager blessure risico (Bonnaerens et al., 2018).
21
1.5 Voorkeurssnelheid
1.5.1 Terminologie en bepaling van voorkeurssnelheid
Voorkeurssnelheid is een abstract begrip en kan op verscheidene manieren worden
geïnterpreteerd. Zatsiorsky definieerde voorkeurswandelen als wandelen waarbij een persoon een bepaalde snelheid en staplengte (of stapfrequentie) aanneemt die hij of zij volledig
spontaan kiest. Die snelheid moet voor de proefpersonen natuurlijk en comfortabel aanvoelen.
De meest objectieve manier om voorkeurssnelheid te bepalen zou zijn om een persoon te observeren die niet weet dat hij/zij geobserveerd wordt, om zo de snelheid van die persoon te berekenen (Levine & Norenzayan, 1999). Een andere manier is om subjecten een bepaalde instructie te geven en hen vervolgens te observeren. De gebruikte instructie zal dan verantwoordelijk zijn voor de gekozen snelheid van de subjecten. . Zo variëren “normale wandelsnelheden” van jonge gezonde subjecten tussen 0.5 m/s en 2.1 m/s tussen studies (Latt et al., 2008), en tot 0,23 m/s binnen studies (Hansen et al., 2004).
Brinkerhoff et al vonden dat maar liefst 61% van de variantie in wandelsnelheid te verklaren is door de gebruikte instructie. Het is dus van belang om consistente instructies voor alle subjecten te hanteren om zo de variabiliteit in locomotiesnelheid reduceren en het onderzoeksveld zo te voorzien van betrouwbare en herhaalbare locomotiesnelheden (Brinkerhoff et al., 2019). Hiernaast geven de onderzoekers ook aan dat proefpersonen vaak om verduidelijking vragen rond de instructie, en het antwoord van de onderzoekers de gekozen snelheid zal beïnvloeden. Het is dus belangrijk om vragen rond de instructie te vermijden, of om voorzichtig om te gaan met de gebruikte verduidelijking. Zo kun je de instructie gewoonweg herhalen of eenzelfde verduidelijkingsinstructie consistent hanteren voor elke proefpersoon (Brinkerhoff et al., 2019). In figuur 16 worden de gekozen wandelsnelheden na verschillende instructies weergegeven uit de studie van Brinkerhoff et al (Brinkerhoff et al., 2019). De gemiddelde gekozen wandelsnelheden variëren tussen 0.91(wandel aan een trage snelheid) en 2.16 m/s (wandel zo snel mogelijk).
22
Fig. 16: De zelfgekozen wandelsnelheid (m/s) )van jonge gezonden subjecten bij verschillende instructies uit (Brinkerhoff et
al., 2019).
De instructie om te wandelen aan een typische of normale wandelsnelheid resulteert in eenzelfde gemiddelde gekozen snelheid: 1.38 m/s. Deze gekozen snelheid komt goed overeen met de gekozen voorkeurssnelheden, bekomen uit andere studies (Tabel 7). Wat ook opvalt is dat de standaardafwijkingen het laagst zijn wanneer proefpersonen één van deze twee instructies krijgen. Om de voorkeurssnelheid op een loopband te bepalen, kan men gebruik maken van een traditionele loopband of een self-paced treadmill (SPTM). In het eerste geval wordt de snelheid van de loopband opgedreven tot het subject aangeeft dat hij/zij aan voorkeurssnelheid loopt. In de tweede methode past de snelheid van de loopband zich automatisch aan de positie van het subject op de band aan. De SPTM wordt verder nog uitgebreid besproken.
1.5.2 Bepalen van voorkeurssnelheid bij wandelen
De zelfgekozen wandelsnelheid is een betrouwbaar gegeven aangezien deze consistent is zowel tussen verschillende tijdstippen op één dag als tussen verschillende dagen (Riley et al., 2007).
23
Hierdoor is het dus niet nodig om de metingen op verschillende tijdstippen of dagen uit te voeren. Dit is waarschijnlijk te wijten aan het feit dat subjecten een voorkeurssnelheid van wandelen kiezen die gelijk aan of dichtbij het metabole optimum ligt (fig. 9), en waarbij het energieverbruik, uitgedrukt in cal.m-1.kg-1, minimaal is (Ralston, 1958)(Pearce et al., 1983) (R.
M. Alexander, 1989).
In de studie van Jordan et al lieten ze de proefpersoon wandelen aan een relatief trage snelheid waarna de onderzoeker de snelheid liet toenemen per 0,1 km/h tot het subject aangaf dat hij aan de voorkeurssnelheid wandelt. Daarna nam de snelheid toe met 1,5 km/h om vervolgens per 0,1 km/h terug af te dalen tot het subject opnieuw aangaf aan voorkeurssnelheid te wandelen. Deze procedure werd herhaald tot er een maximaal verschil van 0,4 km/h was. (Jordan et al., 2007) Het testen van de voorkeurssnelheid op een traditionele loopband is bij wandelen een minder valide methode dan de gouden standaard: overgronds meten. Aangezien een traditionele loopband werkt met vaste snelheden, wordt het subject gedwongen om aan een constante snelheid te wandelen. Wanneer men overgronds wandelt, wordt men niet gedwongen om iedere schrede aan identiek dezelfde snelheid te overbruggen. Een mogelijke oplossing voor dit probleem is de self-paced treadmill waarbij er gebruik gemaakt wordt van feedback gecontroleerde snelheid. Hierbij heeft het subject wel de kans om te wandelen met een meer natuurlijke variabiliteit van snelheid (Sloot et al., 2014).
Ook bepaling van de voorkeurssnelheid bij wandelen op een self-paced treadmill is een betrouwbaar gegeven, zowel tussen verschillende tijdstippen op één dag (ICC 0.982; p=0.000) als tussen verschillende dagen (ICC 0.965; p=0.000). Het is dus mogelijk om een self paced treadmill te gebruiken om de dynamica van wandelen te bestuderen (Choi et al., 2015). Plotnik et al (2015) vonden dat er na 50 à 60m geen significant verschil meer is in voorkeur wandelsnelheid tussen de overgrondse conditie en de conditie op de self-paced treadmill (Plotnik et al., 2015). Ook Lichtenstein et al. (2007) vonden dat er geen significant verschil was in gemeten voorkeurssnelheid bij wandelen tussen de overgrondse- en SPTM conditie (Lichtenstein et al., 2007). De SPTM is dus een valide instrument om de voorkeurssnelheid te meten i.v.m. overgronds wandelen.
24
1.5.3 Determinanten van de voorkeur wandelsnelheid
Er is reeds heel wat onderzoek gedaan naar de determinanten van voorkeurssnelheid bij wandelen. Enkele studies vonden een significant effect van leeftijd op voorkeurssnelheid (Bohannon, 1997) (Oberg et al., 1993). Cunningham et al.(1982) vonden een lagere voorkeurssnelheid van wandelen bij ouderen in vergelijking met die van jongeren. Toch concludeerden ze dat de variabele ‘leeftijd’ niet significant gecorreleerd was aan de voorkeurssnelheid van wandelen, maar wel de VO2-max (p< 0.01) (Cunningham et al., 1982).
Door een lagere VO2-max bij de oudere populatie, werd een lagere voorkeurssnelheid gekozen.
VO2 max was voor 6% van de variantie verantwoordelijk voor de voorkeurssnelheid na de instructie om aan normale snelheid te wandelen, op voorwaarde dat de andere variabelen constant werden gehouden. Indien proefpersonen de instructie kregen om snel en zo snel mogelijk te wandelen, was VO2 max verantwoordelijk voor respectievelijk 15% en 36% van de variantie in voorkeur wandelsnelheid. Er was echter geen significante invloed van het gewicht en de lengte op de voorkeur wandelsnelheid. In tegenstelling tot andere studies, had ook leeftijd geen significante invloed op de voorkeurssnelheid wanneer de andere variabelen in rekening werden gehouden (Cunningham et al., 1982).
Browning et al. voerden in 2006 een studie uit waarbij 39 proefpersonen in vier verschillende groepen verdeeld werden: klasse II obese vrouwen, klasse II obese mannen, mannen met een normaal gewicht en vrouwen met een normaal gewicht. Er werd geen significant verschil gevonden in voorkeurssnelheid tussen de vier groepen, deze bedroeg 1.42 m/s (Browning et al., 2005).
1.5.4 Voorkeurssnelheid van wandelen
In tabel 7 (zie addendum 1) worden de resultaten weergegeven van studies waarbij subjecten instructies kregen om te wandelen aan een normale, comfortabele snelheid. De snelheden variëren van 1.23 m/s tot 1.6 m/s. De kleine variabiliteit tussen de verschillende studies is waarschijnlijk te wijten aan het aanwezig zijn van een metabool optimum bij wandelen (Browning et al., 2005).
25 1.5.5 Bepalen van de voorkeurssnelheid van lopen
Kong et al. (2009) vonden een cronbach alpha-coefficient van 0,99 voor zowel betrouwbaarheid tussen verschillende sessies als tussen de verschillende condities van voorkeurssnelheid van lopen (verschillende soorten schoeisel) (Kong et al., 2009). Ook Queen et al. (2006) vonden geen significant verschil tussen de voorkeur loopsnelheid op twee verschillende testdagen (Queen et al., 2006). De voorkeurssnelheid van lopen is dus een betrouwbaar gegeven en er dus geen nood is aan test-hertesten.
Om de voorkeur loopsnelheid te bepalen, kunnen de subjecten net zoals bij wandelen op een circuit lopen of op een traditionele loopband of op een self-paced treadmill.
Loopsnelheden zijn veelal hoger bij de start en op het einde in vergelijking met het middelste deel van een bepaalde loopafstand. Hierdoor lijkt het opteren voor een continue aanpak waarbij de subjecten rondes lopen in plaats van heen en weer lopen over een baan een meer valide aanpak (Girard et al., 2013) (Chryssanthopoulos et al., 2015).
Om de voorkeurssnelheid op de traditionele loopband te bepalen, moet het subject in staat zijn om de snelheid van de loopband aan te passen naargelang het subject sneller of trager wil lopen. Uit de studie van Kong et al. (2009) blijkt dat de traditionele loopband geen valide manier is om de voorkeur loopsnelheid te bepalen. De onderzoekers lieten subjecten eerst overgronds aan hun voorkeurssnelheid lopen. Vervolgens moesten de subjecten op de loopband lopen aan een snelheid die gelijkaardig aanvoelde. Op de traditionele loopband kozen subjecten om te lopen aan een veel langzamere snelheid (2.20 m/s) dan overgronds (3.65 m/s). De onderzoekers concludeerden dat de perceptie van snelheden beïnvloed wordt op de loopband doordat er vervorming optreedt van de visuele input i.v.m. de overgrondse conditie. (Kong et al., 2009). Ook uit de resultaten van de meta-analyse van Miller et al. (2019) bleek dat de voorkeur loopsnelheid op een traditionele loopband lager was dan de overgrondse voorkeurssnelheid. Volgens de onderzoekers is dit deels te verklaren doordat de subjecten minder controle over de eigen snelheid en minder controle om te stoppen hebben wanneer ze op een traditionele loopband lopen. Hierdoor hebben ze meer angst om te vallen en voelen proefpersonen zich dus minder comfortabel bij lopen op een loopband aan hogere snelheden. Hierdoor heeft men in
26
vergelijking met overgronds wandelen een hogere hartslag en een hogere RPE (Miller et al., 2019).
Indien men toch gebruik zou maken van een traditionele loopband, verwijzen we naar de studie van Jordan et al. Hierin lieten de onderzoekers de snelheid toenemen tot het subject aangaf dat de voorkeurssnelheid werd bereikt. Daarna werd 1,5 km/h toegevoegd aan die snelheid en nam de snelheid af tot het subject aangaf terug aangaf de voorkeurssnelheid bereikt te hebben. Het gebruikte protocol wordt meer in detail beschreven in ‘1.5.2 Bepalen van de voorkeurssnelheid bij wandelen’.
Ten slotte kan men ook gebruik maken van een self-paced treadmill om de voorkeur loopsnelheid te bepalen. Deze loopband laat meer variabiliteit toe in loopsnelheid, dit voelt natuurlijker aan voor de proefpersonen (Sloot et al., 2014). Ook Minetti et al. (2003) besluiten dat de self-paced treadmill een handig toestel is om de normale overgrondse condities voor het bepalen van voorkeurssnelheid (van lopen) te reproduceren (Minetti et al., 2003).
1.5.6 Determinanten van de voorkeur loopsnelheid
Zoals reeds vermeld, heeft lopen, in tegenstelling tot wandelen, volgens de meeste studies, geen metabool optimale snelheid (Margaria, Cerretelli, Aghemo, & Sassi, 1963); (fig. 9 en fig. 14). Hierdoor kan metabole kost geen determinant van de voorkeur loopsnelheid zijn, metabool energieverbruik mogelijks wel. De fitheid van het subject, de loopstijl, de af te leggen afstand, de instructie die het subject krijgt etc. zal een grotere invloed hebben op de voorkeurssnelheid dan bij wandelen (Minetti et al., 2003) (Zamparo, Perini, Peano, & Prampero, 2001). Zo concluderen Zamparo et al. (2001) dat de zelfgekozen snelheid van lopen afhankelijk is van cardiovasculaire- en biomechanische factoren (Zamparo, Perini, Peano, & Di Prampero, 2001). Hiernaast bepaalt de te lopen afstand de voorkeur loopsnelheid. Summerside et al vonden een positieve significante correlatie tussen de te lopen afstand (40 tot 120 m) en de gekozen loopsnelheid. De gekozen loopsnelheid steeg dus wanneer men langere afstanden moest lopen. Deze relatie werd vooral gezien bij subjecten die meer belang hechtten aan temporele factoren (de te lopen tijd) in vergelijking met subjecten die meer belang hechten aan metabole factoren (minimaliseren van metabole kost). Het minimaliseren van de totale tijd om te lopen beïnvloedt dus ook de voorkeur loopsnelheid. De voorkeur wandelsnelheid bleef onveranderd wanneer de
27
te wandelen afstand steeg (Summerside et al., 2018). Figuur 17 geeft een duidelijk overzicht van de resultaten (Summerside et al., 2018).
Fig. 17: De zelfgekozen locomotiesnelheid (m/s) in functie van af te leggen afstand (m). De zwarte punten zijn de data van de gewandelde afstanden boven 30 meter, grijze punten van de gelopen afstanden en witte punten van de gewandelde afstanden onder 30 meter. De zwarte lijn is een modelvoorspellingslijn voor de mediaan die indiceert dat de loopsnelheid stijgt in functie van de te lopen afstand.
Desondanks zijn de bepalende determinanten van de voorkeur loopsnelheid nog relatief onbekend.
Rathkey en Wall Schleffer vonden dat er wel een optimum is van metabole kost bij lopen. In dat geval is het mogelijk dat metabole kost een determinant van de voorkeur loopsnelheid is (Rathkey & Wall-Scheffler, 2017a). Het is interessant om de determinanten van voorkeurstransitiesnelheden (WTR en RTW) aan te halen, aangezien deze waarschijnlijk dezelfde determinanten hebben als de voorkeursnelheden bij wandelen en lopen.
Zo vonden Margaria et al. (1963) dat men overschakelt naar lopen op het moment dat dit energetisch efficiënter wordt dan wandelen aan diezelfde snelheid (Margaria et al., 1963). Er zijn echter meerdere determinanten die aan de basis liggen voor transities. De determinanten zijn gelinkt aan elkaar via complexe interacties. Zelfs de zwakste schakel van deze ‘pool van determinanten’ kan met zijn onderlinge verbanden met de andere determinanten de transitie uitlokken (Segers, 2006). Enkele van deze determinanten zijn: energetische optimalisatie,
28
musculaire of kinematische triggers, mechanisch limiet, kinetische belasting, zicht en trainingsstatus, cognitieve sturing of het gebeurt gewoon (Segers, 2006).
1.5.7 Voorkeurssnelheid van lopen
Aangezien er veel tegenstrijdigheid is over het al dan niet bestaan van een directe link tussen voorkeur loopsnelheid en metabole kost, is er in de literatuur nog geen consensus over deze snelheid. Vermoedelijk door deze reden is de range van voorkeur loopsnelheden in verschillende studies en tussen verschillende subjecten binnen één studie veel groter dan bij wandelen. In tabel 8 worden enkele studies weergegeven waarbij de voorkeurssnelheid van lopen gemeten werd. De snelheden variëren van 2.74 m/s bij ongetrainde lopers (Minetti et al., 2003) tot 3.77 m/s bij goed getrainde lange afstandslopers (Bus, 2003). Studies die wel een metabool optimum vonden gaven aan dat deze snelheid 3,7 m/s bedraagt bij goed getrainde mannelijke lange afstandslopers (meer dan 40 km per week). Deze snelheid kwam goed overeen met hun metabool meest economische snelheid van 3,6 m/s (Rathkey & Wall-Scheffler, 2017a)
Enkele van de determinanten die de voorkeur loopsnelheid dus mogelijks bepalen zijn: gebruikte protocol (buiten, traditionele loopband of self paced loopband), gebruikte instructie, de te lopen afstand, cardiovasculaire (getraindheid) en biomechanische factoren, minimaliseren metabole kost en waar men zich bevindt in de te lopen afstand (begin, einde of midden).
1.6 Metabole kost bij voorkeurssnelheid
1.6.1 Metabole kost van wandelen aan voorkeurssnelheid
Zoals reeds aangehaald bestaat er een metabool optimale snelheid bij wandelen en ligt de voorkeurssnelheid van wandelen in de buurt van dat optimum (Ralston, 1958) (Pearce et al., 1983) (R. M. Alexander, 1989) (Martin et al., 1992). Het energieverbruik bij wandelen aan voorkeurssnelheid zou afhankelijk zijn van enkele determinanten. Zo vonden Jones et al. (2009) dat de netto metabole kost voor wandelen aan voorkeurssnelheid bij vrouwen ouder dan 50 jaar (2.74 J.kg-1.m-1) 15% hoger is dan bij vrouwen jonger dan 50 jaar (2.39 J.kg-1.m-1). Toch is de
29
m/s) (Jones et al., 2009). Leeftijd beïnvloedt dus mogelijks niet alleen de voorkeurssnelheid, maar ook het energieverbruik aan die snelheid. Enkele andere studies bevestigden dat oudere subjecten een lagere zelfgekozen wandelsnelheid hebben, maar een hoger energieverbruik (Haveman‐Nies et al., 1996) (Waters et al., 1983)(Malatesta et al., 2003).
1.6.2 Metabole kost van lopen aan voorkeurssnelheid
Tot op de dag van vandaag is er slechts beperkt onderzoek gedaan naar de relatie tussen het metabole energieverbruik en de voorkeurssnelheid bij lopen. Dit vooral omdat oudere studies zich focusten op de lineaire relatie tussen snelheid en metabool energieverbruik, waarbij er dus
geen metabool optimale snelheid aanwezig is.
Recenter, onderzochten Rathkey en Wall-Scheffler wel naar de relatie tussen de metabole kost en voorkeurssnelheid. Ze vonden dat de metabole kost werd geminimaliseerd bij voorkeurssnelheid, en mensen er dus automatisch voor kozen om aan een snelheid te lopen waarbij de metabole kost minimaal is (Rathkey & Wall-Scheffler, 2017a). Bij deze studie waren de subjecten goed getrainde lopers: alle participanten konden 1609m (één mijl) volledig aeroob lopen onder de 390 seconden. In deze studie willen we deze relatie onderzoeken bij een minder getrainde populatie, en kijken of metabole kost een determinant is van voorkeursloopsnelheid bij een gezonde, sportieve populatie.
30
1.7 Probleemstelling
Uit de literatuurstudie blijkt dat er veel meer onzekerheden zijn rond de thema’s energieverbruik bij lopen en voorkeurssnelheid van lopen, en de relatie tussen die beiden, dan bij wandelen. Ondanks dat men lang heeft gedacht dat er bij lopen een lineair verband is tussen de snelheid en het metabole energieverbruik (Margaria et al., 1963a), zijn er reeds recentelijk studies verschenen die beweren dat er toch een metabool optimale snelheid voor lopen aanwezig is. Er is dus nog onvoldoende onderzoek gedaan naar metabole kost/ energieverbruik bij voorkeur loopsnelheid en snelheden rond deze voorkeur loopsnelheid.
Er ontbreekt ook een consensus over hoe de voorkeur locomotiesnelheid het best wordt bepaald op de loopband: instructie, loopbandprotocol, te lopen afstand…
31
1.8 Onderzoeksvragen en hypotheses
1.8.1 Onderzoeksvraag 1: Welk loopbandprotocol simuleert het best overgronds
lopen?
We beschouwen overgronds lopen als de gouden standaard voor het bepalen van de voorkeur loopsnelheid. Om verder onderzoek te kunnen doen over voorkeur loopsnelheid op een loopband moet men eerst een loopbandprotocol hebben waarbij de voorkeur loopsnelheid en het energieverbruik zo nauw mogelijk aansluiten bij de outdoor conditie.
Hypothese 1:
De voorkeur loopsnelheid overgronds is significant groter dan de voorkeur loopsnelheid op eender welk protocol op de loopband.
Hypothese 2:
Het metabole energieverbruik zal voor eenzelfde snelheid hoger liggen wanneer op een loopband wordt gelopen.
1.8.2 Onderzoeksvraag 2: Is er een optimum in energieverbruik bij lopen?
Hypothese 1: Er is een metabool optimum waarbij het energieverbruik overeenkomt met 1 kcal. kg-1.km-1.
Hypothese 2: Het verbruik zal stijgen naar ongeveer 1,15 kcal. kg-1.km-1 naarmate er meer naar de natuurlijke WRT-transitiesnelheid of maximale aerobe snelheid wordt gegaan.
Hypothese 3: Indien er een metabool optimale snelheid is, komt deze overeen met de voorkeur loopsnelheid.
32
2. Literatuurstudie nieuwe masterproef
2.1 Voorkeur loopsnelheid
In onze eerste literatuurstudie bespraken we de voorkeurssnelheid bij lopen (en wandelen) reeds uitgebreid. Hier is nog eens een korte opfrissing.
Voorkeur loopsnelheid is de snelheid waaraan proefpersonen kiezen om te lopen, als ze de instructie krijgen om te lopen aan de snelheid die voor hen het meest natuurlijk en comfortabel aanvoelt.
In tegenstelling tot wandelen is de metabole kost van lopen niet afhankelijk van de loopsnelheid. De hoeveelheid energie, nodig om al lopend een gegeven afstand te overbruggen, blijft constant over een wijd verspreid bereik aan sub-maximale snelheden (Margaria et al., 1963b). Op vlak van metabole energie is er bijgevolg waarschijnlijk geen optimale snelheid.
33
2.2 Determinanten van de voorkeur loopsnelheid
Ondanks dat de meeste literatuur aantoont dat er bij lopen geen optimale snelheid in functie van energieverbruik bestaat, zijn er toch enkele recente studies die het tegendeel beweren. De studie van Steudel et al. is de eerste studie die beweert dat er toch een optimale snelheid in functie van energieverbruik bestaat. De voorkeur loopsnelheid voor vrouwen bedraagt in deze studie 2,9 m/s en voor mannen 3,7 m/s. Een verklaring waarom er in deze studie wel een optimale loopsnelheid is, ligt hem in de combinatie van het subtiele verschil tussen de lineaire en de curvilineaire fit en het feit dat men in het verleden de curve van het metabole energieverbruik boven de curve van de metabole kost verkoos (Steudel-Numbers & Wall-Scheffler, 2009a). Bovendien is de hypothese dat er een optimale snelheid in functie van het energieverbruik bestaat, voornamelijk aangetoond bij getrainde lopers.
Door omstandigheden hebben wij echter niet meer de mogelijkheid om het metabole energieverbruik bij onze proefpersonen te meten. Daarom gaan we hier niet verder op in.
Naast het metabole energieverbruik, zijn er tal van andere factoren die mogelijks een invloed hebben op de voorkeur loopsnelheid. De fitheid van het subject, de loopstijl, de af te leggen afstand, de instructie die het subject krijgt etc. zullen een grotere invloed hebben op de voorkeurssnelheid dan bij wandelen (Minetti et al., 2003). Uit Zamparo et al. blijkt dat in tegenstelling tot de maximale snelheid in uithoudingswedstrijden, de voorkeur loopsnelheid niet meteen correleert met anaerobe drempelwaarden. Wanneer de subjecten aan een snelheid van 3,6 m/s liepen, zijn mechanische vermogen per stap en metabole energiekost minimaal. Dit wil zeggen dat de zelfgekozen snelheid bij lopen afhankelijk is van zowel cardiovasculaire en biomechanische factoren (Zamparo, Perini, Peano, & Prampero, 2001). Desondanks blijven de bepalende factoren van de voorkeur loopsnelheid nog relatief onbekend.
In deze studie ligt de focus echter meer op het vastleggen van de voorkeur loopsnelheid van een 5 km run. Daarnaast wordt de variabiliteit in voorkeur loopsnelheid in kaart gebracht. Om deze variabiliteit te bepalen en het onderzoek een grotere kracht te geven, lopen de proefpersonen meerdere keren. Bijkomend zullen enkele kenmerken van de proefpersonen zoals getraindheid, geslacht, BMI,… getest worden op correlaties met de voorkeur
34
loopsnelheid. Hierdoor kan er gespeculeerd worden over mogelijke determinanten van voorkeur loopsnelheid.
Om valide metingen te verkrijgen werden alle runs overgronds gelopen. Dit wordt gezien als de gouden standaard om looptesten uit te voeren aangezien uit voorgaand onderzoek blijkt dat de voorkeur loopsnelheid drastisch daalt wanneer men op een loopband loopt (Zie tabel 8).