EMOTIES BIJ SOCIALE ROBOTS
DE GEBRUIKERSACCEPTATIE VAN PSYCHOTHERAPEUTISCHE
ROBOTS
Aantal woorden: 24.155
Jente De Clercq & Thijs St Martin
Stamnummer: 01504752 & 01501353
Promotor: Prof. Dr. Amy Van Looy
Masterproef voorgedragen tot het bekomen van de graad van:
Master in de handelswetenschappen: management en informatica
Vertrouwelijkheidsclausule
Ondergetekende verklaart dat de inhoud van deze masterproef mag geraadpleegd en/of gereproduceerd worden, mits bronvermelding.
Naam studenten: Jente De Clercq & Thijs St Martin
Handtekeningen:
Woord vooraf
Deze masterproef werd geschreven voor het behalen van de graad Master of Science in de Handelswetenschappen in de afstudeerrichting Management & IT. Deze sectie zouden we graag toewijden om enkele mensen te bedanken zonder wie de uiteenzetting van deze masterproef niet mogelijk was.
Om te beginnen zouden we graag de promotor Prof. Dr. Amy Van Looy willen bedanken. Zij heeft ons enerzijds de nodige technieken om deze thesis uit te werken aangeleerd in het opleidingsonderdeel Onderzoeksmethoden in management en informatica. Anderzijds heeft ze voor de nodige feedback gezorgd om deze masterproef naar een hoger niveau te tillen.
Vervolgens zouden we ook graag onze ouders bedanken. Zonder hen zou het niet mogelijk geweest zijn om deze opleiding te volgen. Daarnaast waren ze vaak onze steun en toeverlaat. Om diezelfde reden willen we ook onze andere gezinsleden, lieven en vrienden bedanken.
Om af te sluiten zouden we graag de respondenten van de enquête willen bedanken. Zonder hun bijdrage was dit onderzoek niet mogelijk. Ook diegenen die de thesis hebben nagelezen worden bij deze bedankt.
Inhoudsopgave
Woord vooraf ... I Inhoudsopgave ... II Figuren ... VII Tabellen ... VII Lijst met afkortingen ... VIII
Deel 1: Introductie ... 1
Deel 2: Literatuurstudie ... 2
2.1 Artificiële intelligentie ... 2
2.1.1 Definitie ... 2
2.1.2 Componenten van artificiële intelligentie ... 3
2.1.3 Vormen van artificiële intelligentie ... 5
2.2 Robotica ... 5 2.2.1 Definitie ... 5 2.2.2 Componenten ... 6 2.2.3 Types robotica ... 8 2.3 De sociale robot ... 8 2.3.1 Definitie ... 9 2.3.2 Maatschappelijke relevantie ... 10 2.3.3 SWOT ... 10 2.3.3.1 Sterktes (Strengths)... 11 2.3.3.2 Zwaktes (Weaknesses) ... 12 2.3.3.3 Mogelijkheden (Opportunities) ... 13 2.3.3.4 Bedreigingen (Threats) ... 14
2.3.4 Ontwerp van sociale robots ... 15
2.3.4.1 Virtueel - en fysiek belichaamde agenten ... 15
2.3.4.2 Robotbelichaming en antropomorfisme ... 16
2.3.5 Applicaties ... 20 2.3.5.1 Autismebehandeling ... 20 2.3.5.2 Ouderenzorg ... 21 2.3.5.3 Psychotherapie ... 22 2.3.5.4 Educatie ... 23 2.4 Theoretische achtergrond ... 24 2.4.1 Gebruikersacceptatie ... 24 2.4.1.1 Prestatieverwachting ... 25 2.4.1.2 Inspanningsverwachting ... 26 2.4.1.3 Sociale invloed ... 26 2.4.1.4 Faciliterende condities ... 26 2.4.1.5 Hedonische motivatie ... 27 2.4.1.6 Prijswaarde ... 27 2.4.1.7 Gewoonte ... 27 2.4.1.8 Gebruiksintentie... 27
2.4.2 Mens-Robot Interactie (MRI) ... 28
2.4.2.1 Definitie ... 28
2.4.2.2 Robotgerichte MRI ... 29
2.4.2.3 Mensgerichte MRI ... 29
2.4.2.4 Robot cognitiegerichte MRI ... 30
2.5 Bestaande studies rond emoties bij sociale robots (SLR) ... 31
2.5.1 Selectiecriteria ... 32
2.5.1.1 Emoties als systeemcomponent ... 32
2.5.1.2 Emoties als bestaansreden ... 33
2.5.1.3 Kanalen ... 33
2.5.2 Bespreking subthema’s ... 34
2.5.2.1 Emoties als systeemcomponent ... 34
2.5.2.2 Emoties als bestaansreden ... 35
Deel 3 Methodologie ... 40 3.1 Probleemstelling en onderzoeksvraag ... 40 3.2 Wetenschappelijke relevantie ... 41 3.3 Maatschappelijke relevantie ... 41 3.4 Type onderzoek ... 42 3.5 Onderzoeksmodel ... 42 3.6 Hypotheses ... 44
3.6.1 Onderzoeksvraag 1: Welke constructen beïnvloeden de intentie om psychotherapeutische robots te gebruiken? ... 44
3.6.1.1 Prestatieverwachting (PV) ... 44
3.6.1.2 Inspanningsverwachting (IV) ... 44
3.6.1.3 Sociale Invloed (SI) ... 45
3.6.1.4 Faciliterende Condities (FC) ... 45
3.6.1.5 Hedonische Motivatie (HM) ... 46
3.6.1.6 Vertrouwen (V)... 46
3.6.1.7 Privacy Zorgen (PZ) ... 47
3.6.1.8 Gebruiksintentie (GI) ... 47
3.6.2 Onderzoeksvraag 2: Welke moderatoren beïnvloeden de constructrelaties van de gebruiksintentie? ... 48
3.6.2.1 Moderatie effect Geslacht en Leeftijd op H1 (PV
→
GI) ... 483.6.2.2 Moderatie effect Geslacht en Leeftijd op H2 (IV
→
GI) ... 483.6.2.3 Moderatie effect Geslacht en Leeftijd op H3 (SI
→
GI) ... 483.6.2.4 Moderatie effect geslacht en leeftijd op H4 (FC
→
GI) ... 493.6.2.5 Moderatie effect geslacht en leeftijd op H5 (HM
→
GI) ... 493.6.2.6 Moderatie effect geslacht en leeftijd op H6 (V
→
GI) ... 493.6.2.7 Moderatie effect geslacht en leeftijd op H7 (PZ
→
GI) ... 493.7 Codering ... 49
3.9 Dataverzameling ... 51 3.10 Enquête ... 51 3.11 Respondenten ... 52 3.12 Evaluatiecriteria ... 53 3.12.1 Validiteit ... 53 3.12.1.1 Interne validiteit ... 53 3.12.1.2 Externe validiteit ... 53 3.12.1.3 Inhoudsvaliditeit ... 53 3.12.1.4 Constructvaliditeit ... 53 3.12.1.5 Betrouwbaarheid ... 54 Deel 4 Resultaten ... 55
4.1 Onderzoeksvraag 1: Welke constructen beïnvloeden de intentie om psychotherapeutische robots te gebruiken? ... 55 4.1.1 H1: De correlatie tussen PV en GI ... 56 4.1.2 H2: De correlatie tussen IV en GI ... 56 4.1.3 H3: De correlatie tussen SI en GI ... 56 4.1.4 H4: De correlatie tussen FC en GI ... 56 4.1.5 H5: De correlatie tussen HM en GI ... 56 4.1.6 H6: De correlatie tussen V en GI ... 56 4.1.7 H7: De correlatie tussen PZ en GI ... 57
4.2 Onderzoeksvraag 2: Welke moderatoren beïnvloeden de constructrelaties van de gebruiksintentie? ... 57
4.2.1 Prestatieverwachting ... 57
4.2.1.1 H8: Geslacht als moderator op Prestatieverwachting (PV) → Gebruiksintentie (GI) ... 57
4.2.1.2 H9: Leeftijd als moderator op Prestatieverwachting (PV) → Gebruiksintentie (GI) ... 58
4.2.2 Inspanningsverwachting (IV) ... 58
4.2.3 Sociale Invloed (SI) ... 58
4.2.3.1 H12: Geslacht als moderator op Sociale Invloed (SI) → Gebruiksintentie (GI) ... 58
4.2.3.2 H13: Leeftijd als moderator op Sociale Invloed (SI) → Gebruiksintentie (GI) ... 59
4.2.5 Hedonische Motivatie (HM) ... 59
4.2.6 Vertrouwen (V)... 59
Deel 5 Discussie ... 60
Deel 6 Conclusie ... 63 Deel 7 Bibliografie ... X Deel 8 Bijlagen ... XXIII 8.1 Bijlage 1: SLR tabel ... XXIII 8.2 Bijlage 2: Enquête ... XXXV 8.3 Bijlage 3: Factoranalyses ... XLVI 8.4 Bijlage 4: Cronbach’s alpha analyses ... LIV 8.5 Bijlage 5: multiple regressieanalyse ... LVI 8.6 Bijlage 6: Moderatoranalyses ...LVII
Figuren
Figuur 1. Verschillende lagen in neurale netwerken. Aangepast overgenomen van Kreutzer & Sirrenberg,
2020 ... 4
Figuur 2. Robot manipulator. Aangepast overgenomen van Craig, 2005 ... 7
Figuur 3. Antropomorfische driehoek toegepast op robothoofden. Aangepast overgenomen van Duffy, 2003 ... 17
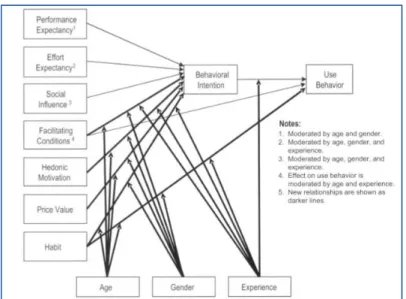
Figuur 4. Unified Theory of Acceptance and Use of Technology 2 (UTAUT2). Overgenomen van Venkatesh et al., 2012 ... 25
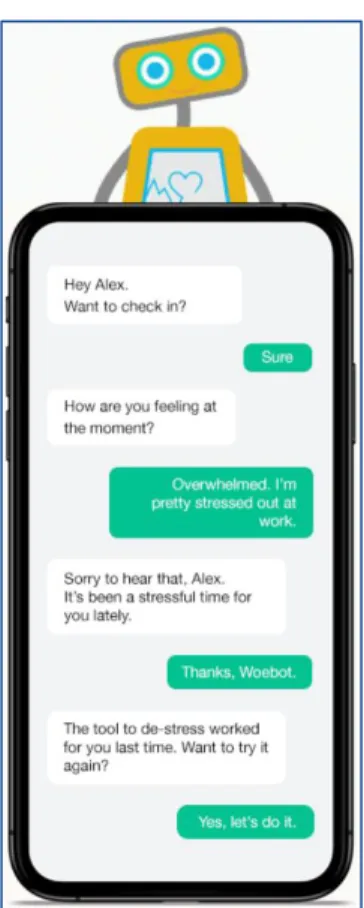
Figuur 5. De psychotherapeutische sociale robot Woebot. Overgenomen van Woebot (2017) ... 36
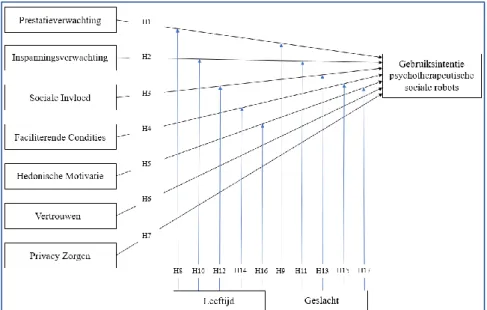
Figuur 6. UTAUT2-model, aangepast naar de acceptatie van psychotherapeutische sociale robots ... 43
Figuur 7. Onderzoeksmodel met significante regressiecoëfficiënten ... 61
Tabellen
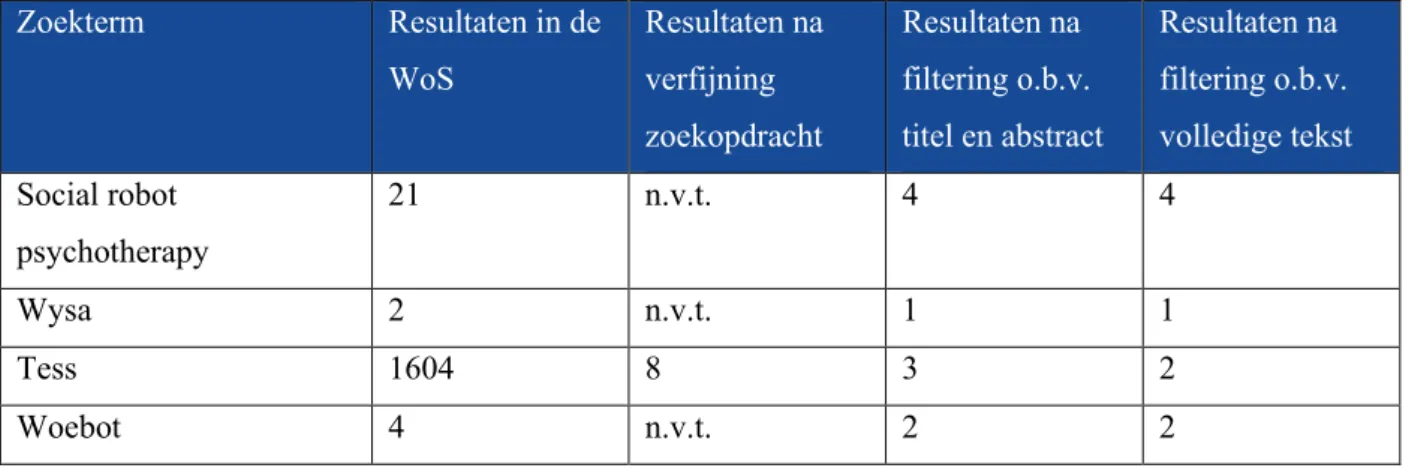
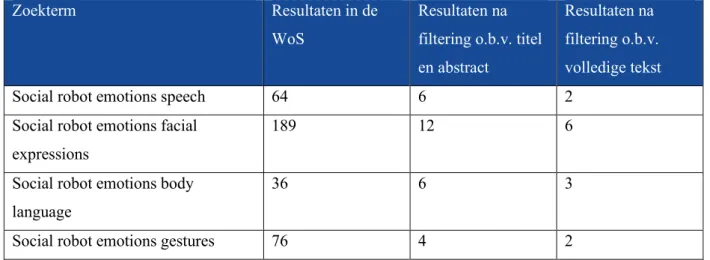
Tabel 1. SWOT-analyse sociale robots ... 11Tabel 2. SLR filtering voor emoties als systeemcomponent ... 32
Tabel 3. SLR filtering voor emoties als bestaansreden ... 33
Tabel 4. SLR filtering voor kanalen ... 34
Tabel 5. Codering ... 50
Tabel 6. Beschrijvende tabel geslacht ... 52
Tabel 7. Beschrijvende tabel leeftijd ... 52
Tabel 8. Beschrijvende tabel eerder gebruik ... 53
Tabel 9. Cronbach’s alpha ... 54
Tabel 10. Model gebruikersacceptatie van psychotherapeutische sociale robots (N=252) ... 55
Tabel 11. Moderatorenanalyse H8 ... 57
Tabel 12. Moderatorenanalyse H9 ... 58
Tabel 13. Moderatorenanalyse H12 ... 58
Tabel 14. Moderatorenanalyse H13 ... 59
Tabel 15. Moderatoranalyse Geslacht op Vertrouwen (V) → Gebruiksintentie (GI) ... 60
Lijst met afkortingen
Adaptive Character of Thought-Rational ACT-R Adaptive Character of Thought-Rational / Embodied ACT-R/E
Artificiële Intelligentie AI
Confirmerende Factoranalyse CFA
Combined TAM & TPB C-TAM-TPB
Computerondersteunende therapie COT
Faciliterende Condities FC
Gebruiksintentie GI
Hedonische Motivatie HM
Informatiesysteem IS
Innovation Diffusion Theory IDT
Inspanningsverwachting IV
Internet of Things IoT
Machinaal Leren ML
Mens-Computer Interactie MCI
Mens-Robot Interactie MRI
Model of PC Utilization MPCU
Motivation Model MM
Natuurlijke taalgeneratie NTG
Principale Componenten Analyse PCA
Prestatieverwachting PV
Privacy Zorgen PZ
Robotica, Artificiële Intelligentie, en Automatisatie RAIA
Social Cognitive Theory SCT
Sociale Assisterende Robots SAR
Sociale Invloed SI
Sociale Mens-Robot Interactie SMRI
Socially guided-machine learning SG-ML
SWOT Strengths, Weaknesses, Opportunities, Threats
Systematic Literature Review SLR
Technology Acceptance Model TAM
Theory of Planned Behavior TPB
Theory of Reasoned Action TRA
Toegevoegde Realiteit TR
USD Amerikaanse Dollar
UTAUT Unified Theory of Acceptance and Use of Technology
Vertrouwen V
Virtuele Realiteit VR
Abstract. De hedendaagse westerse maatschappij wordt gekenmerkt door verschijnselen die de mentale
gezondheid negatief beïnvloeden zoals depressies en burn-outs. Psychotherapeutische robots trachten de mentale gezondheid te verbeteren door mensen te helpen in het omgaan met hun emoties. Jammer genoeg is er nog geen onderzoek gevoerd naar de acceptatie van dergelijke sociale robots, wat dan ook de opzet is van dit onderzoek. Aan de hand van een enquête ingevuld door 253 respondenten werden constructen bevraagd voor de acceptatie van psychotherapeutische op basis van het UTAUT2-model. De resultaten tonen aan dat prestatieverwachting, sociale invloed en vertrouwen belangrijke constructen zijn die de gebruikersacceptatie bevorderen. Daarnaast wordt aangetoond dat zowel leeftijd als geslacht geen modererend effect hebben op deze relaties. Dit impliceert dat deze constructen in rekening moeten worden gebracht bij het ontwerpen van dergelijke psychotherapeutische robots, ongeacht de doelgroep die bereikt wil worden.
Sleutelwoorden: Emoties; Sociale robotica; Psychotherapeutische robots; Artificiële intelligentie;
Deel 1: Introductie
Economen hebben drie gerelateerde mechanismen geïdentificeerd die een impact hebben op economische groei (McArthur & Sachs, 2001). De eerste is de efficiënte allocatie van middelen, gebaseerd op de marktcompetitie en een gebalanceerde arbeidsverdeling. Adam Smith haalde deze factor reeds aan in 1776. De tweede factor is de accumulatie van kapitaal. Naast de vaste activa bestaat productief kapitaal ook uit menselijk kapitaal (zoals opleiding, gezondheid, enzovoort). Ten derde is er de technologische vooruitgang, die het meest cruciaal is voor dit onderzoek. Technologische vooruitgang kan worden bereikt op twee manieren:
I. Technologische innovatie: de creatie van een nieuwe technologie.
II. Technologische diffusie: overnemen en aanpassen van reeds bestaande technologieën.
Verschillende opkomende technologieën hebben een potentieel disruptieve impact op zowel bedrijven en overheden, als op de samenleving in zijn geheel (Schuelke-Leech, 2018). Disruptieve technologieën zijn deze die een omwenteling in bestaande marktstructuren en bedrijven veroorzaken. Ze zijn goedkoper, simpeler, en gebruiksvriendelijker dan de dominante technologieën (Schuelke-Leech, 2018). Volgens Batty (2020) is een technologie disruptief als deze de markt betreedt en zodanig verandert dat mensen zaken anders gaan aanpakken, of nieuwe zaken kunnen verwezenlijken die ervoor niet mogelijk waren. Het onderzoek van Schuelke-Leech (2018) geeft een overzichtelijke weergave van heel wat disruptieve technologieën. Voorbeelden zijn: 3D printen, artificiële intelligentie (AI) en machinaal leren (ML), toegevoegde realiteit (TR), virtuele realiteit (VR), ‘blockchain’, ‘chatbots’, ‘Internet of Things’ (IoT), intelligente systemen en robotica. Dat robotica en intelligente systemen tevoorschijn komen in deze lijst is geen toeval. Verschillende toepassingen van robotica en intelligente systemen hebben het potentieel om een diepgaande impact uit te oefenen op onze samenleving, alsook om de manier van leven, leren en werken te transformeren (Reddy, 2006).
Deze masterproef focust zich meer specifiek op psychotherapeutische robots. Dergelijke sociale robots worden ingezet om de mentale gezondheid te verbeteren door mensen te helpen in het omgaan met hun emoties en zijn oorspronkelijk ontwikkeld als reactie op een stijging van het aantal depressiegevallen en burn-outs die de mentale gezondheid aantasten (Sachan, 2018). Met behulp van psychotherapeutische robots kunnen mensen bereikt worden die lijden aan dergelijke gedragsstoornissen maar die niet beschikken over de financiële middelen om hulp te krijgen (Fiske, Henningsen, & Buyx, 2019). Desalniettemin is dit niet hun enige doelpubliek en zijn ze ontwikkeld om de gemoedstoestand en levenskwaliteit te bevorderen van alle mensen (Sachan, 2018). Meerdere studies toonden hierin reeds hun effectiviteit aan (Costescu, Vanderborght, & David, 2014; Fitzpatrick, Darcy, & Vierhile, 2017; Fulmer, Joerin, Gentile, Lakerink, & Rauws, 2018; Inkster et al., 2018). De leemte situeert zich echter in de acceptatie van psychotherapeutische robots bij het grote publiek, wat dan ook het onderzoeksonderwerp is van dit onderzoek. Hiervoor werden
twee onderzoeksvragen opgesteld: 1) “Welke constructen beïnvloeden de intentie om psychotherapeutische robots te gebruiken?” en 2) “Welke moderatoren beïnvloeden de constructrelaties van de gebruiksintentie?”. Aan de hand van kwantitatief onderzoek in de vorm van een surveyonderzoek wordt er een antwoord geformuleerd op deze vragen.
De paper verloopt als volgt. Deel 2 zal een uitgebreide literatuurstudie omtrent artificiële intelligentie en (sociale) robotica uiteenzetten. Vervolgens zal de gekozen methodologie van dit onderzoek beargumenteerd en toegelicht worden in deel 3, waarna de resultaten in deel 4 zullen worden opgenomen. Deel 5 zal een discussie formuleren, gevolgd door de conclusie in deel 6.
Deel 2: Literatuurstudie
Zoals reeds vermeld behandelt deze sectie een literatuurstudie. Sectie 2.1 en sectie 2.2 zullen artificiële intelligentie en robotica onder de loep nemen, waarna er specifiek zal worden ingegaan op sociale robotica in sectie 2.3. Sectie 2.4 formuleert een theoretische achtergrond, bestaande uit gebruikersacceptatie en Mens-Robot Interactie (MRI). Om af te sluiten zal sectie 2.5 een Systematic Literature Review (SLR) over emoties bij sociale robots presenteren.
2.1 Artificiële intelligentie
Robotica bestudeert de verbinding tussen waarnemen en actie ondernemen, wat later in sectie 2.2 verder wordt uitgewerkt. Artificiële intelligentie (AI) speelt een centrale rol om deze verbinding intelligent te maken (Brady, 1985). AI vormt met andere woorden de basis voor de creatie van intelligente robots en systemen. Deze technologie is dus uitermate belangrijk in de ontwikkeling van sociale robots. Daarom is het noodzakelijk om eerst en vooral een duidelijk zicht te hebben op wat artificiële intelligentie inhoudt. Wanneer dit inzicht verworven is, kan er worden overgegaan naar robotica. Op basis van een diepgaand begrip omtrent deze twee technologieën wordt de transitie naar sociale robotica verwezenlijkt.
2.1.1 Definitie
Wanneer het begrip artificiële intelligentie gedefinieerd moet worden, kan er geconcludeerd worden dat er geen eenduidige definitie bestaat. Daarom wordt het begrip artificiële intelligentie omschreven aan de hand van een combinatie van eerdere definities.
De pionier van artificiële intelligentie, John McCarthy, formuleerde in 1955 een eerste definitie: “Het
doel van artificiële intelligentie is om machines te ontwikkelen die zich gedragen alsof ze intelligent zijn”.
Later werd deze definitie ontkracht, omdat het duidelijk werd dat schijnbaar intelligent gedrag makkelijk gecreëerd kan worden aan de hand van simpele technologieën (Ertel, 2018).
In 1983 gaf Rich een meer flexibele definitie voor het begrip: “Artificiële intelligentie bestudeert hoe we
reikwijdte van artificiële intelligentie continu wordt aangepast, waardoor ze steeds relevant zal blijven. Daarnaast wordt ook duidelijk waarmee artificiële intelligentie zich bezig houdt, namelijk dingen waar tot nu toe mensen beter in zijn. Dit bevat onder meer perceptie, de mogelijkheid om te argumenteren en de mogelijkheid om zelfstandig te leren om zo onafhankelijk oplossingen te vinden voor problemen (Kreutzer & Sirrenberg, 2020). Meerdere wiskundige problemen in een korte periode oplossen is dus geen toepassing van artificiële intelligentie, aangezien dit iets is waar computers altijd al beter in zijn geweest (Ertel, 2018).
In het woordenboek van Gartner (“Artificial Intelligence (AI)”, z.d) wordt artificiële intelligentie als volgt gedefinieerd: “Artificiële intelligentie past geavanceerde analyses en op logica gebaseerde
technieken toe, zoals machinaal leren, om gebeurtenissen te interpreteren, beslissingen te ondersteunen en te automatiseren en acties te ondernemen”. In tegenstelling tot vorige definities haalt Gartner de
onderliggende technieken van artificiële intelligentie aan. Dat komt omdat pas later inzicht werd verworven in deze technieken.
Door vorige drie definities te combineren, kan de volgende definitie van artificiële intelligentie worden voorgesteld:
“De ontwikkeling van machines die taken kunnen uitvoeren waar mensen (tot op heden) beter in zijn,
aan de hand van geavanceerde analyses en op logica gebaseerde technieken.”
Nu er een duidelijk begrip van artificiële intelligentie geformuleerd is, kan er worden overgegaan naar de verschillende componenten die cruciaal zijn voor deze technologie.
2.1.2 Componenten van artificiële intelligentie
Er kunnen drie verschillende componenten worden onderscheiden die de basis vormen voor de werking van artificiële intelligentie, zijnde neurale netwerken, machinaal leren en diep leren (Kreutzer & Sirrenberg, 2020).
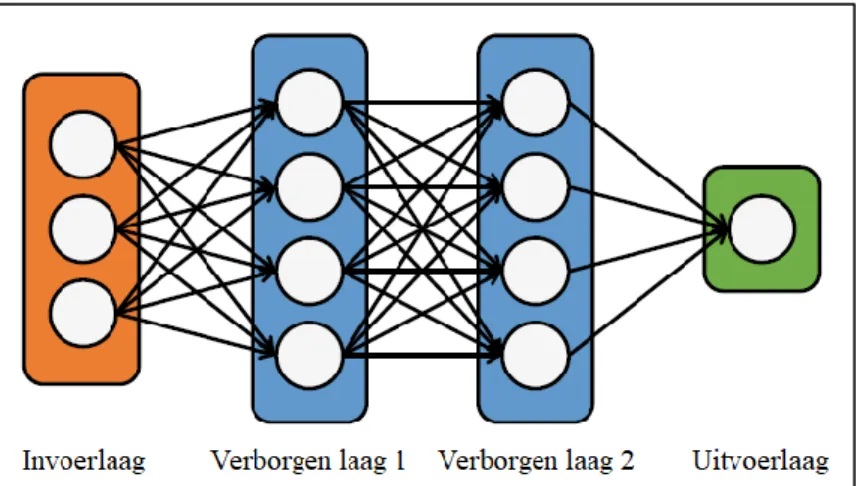
Biologische neurale netwerken zijn de reden dat mensen verschillende motorische en intellectuele bekwaamheden kunnen aanleren. Ze worden gevormd door meerdere zenuwcellen in de hersenen aan elkaar te koppelen (Ertel, 2018). Computerwetenschappers trachten biologische neurale netwerken na te maken in de vorm van artificiële neurale netwerken. Deze vormen de kern van artificiële intelligentie. Artificiële neurale netwerken zijn netwerken van hardware en software die het menselijke brein zo realistisch mogelijk proberen na te bootsen. De processoren van neurale netwerken zijn georganiseerd in verschillende lagen, namelijk één invoerlaag, meerdere verborgen lagen en één uitvoerlaag (Kreutzer & Sirrenberg, 2020). Figuur 1 geeft dit weer.
Figuur 1. Verschillende lagen in neurale netwerken. Aangepast overgenomen van Kreutzer & Sirrenberg, 2020 Door die structuur werkt een AI-systeem als volgt: allereerst komt de ruwe data binnen in de eerste laag van het systeem, namelijk de invoerlaag. Deze invoerlaag voert operaties uit op de ruwe data en geeft de behandelde data door aan de eerste verborgen laag. De eerste verborgen laag zal eveneens operaties uitvoeren en vervolgens de behandelde data doorgeven aan de tweede verborgen laag. Dit proces wordt herhaald tot de data toekomt in de uitvoerlaag, die de uitvoer van het AI-systeem genereert (Kreutzer & Sirrenberg, 2020).
De manier waarop klassieke systemen gegevens behandelen, hangt af van een vooraf geprogrammeerde set van algoritmes die niet wijzigen gedurende de levensduur van het systeem. Het verschilpunt met AI-systemen is dat deze een speciaal type van algoritmes gebruiken, namelijk zelflerende algoritmes. Dit type van algoritmes laat toe dat het systeem zichzelf verbetert zonder de interventie van programmeurs. Telkens wanneer gegevens worden doorgegeven tussen de lagen heen, leert het systeem. Hierdoor kunnen er nieuwe algoritmes worden gevormd. Wanneer een nieuwe vorm van een algoritme performanter is dan een oude vorm, zal het systeem overschakelen op de nieuwere vorm en de oude opzij schuiven. Dit proces noemt
machinaal leren. Aan de hand van machinaal leren beschikt elke processor in het neurale netwerk over
een eigen kennisgebied. Deze techniek wordt gebruikt door AI-systemen die hierdoor zelf kunnen leren om echte wereldproblemen op te lossen, zonder dat ze expliciet geprogrammeerd moeten zijn (Kühl, Goutier, Hirt, & Satzger, 2019). Een belangrijke vereiste voor succes is de beschikbaarheid van een grote hoeveelheid kwaliteitsvolle data, namelijk de trainingsdata (Kreutzer & Sirrenberg, 2020). Terugkoppelend naar de gesuggereerde definitie voor artificiële intelligentie en aannemend dat de bekwaamheid om te leren veel sterker ontwikkeld is bij mensen dan bij computers, kan er besloten worden dat onderzoek naar leermechanismes zoals machinaal leren één van de belangrijkste takken van artificiële intelligentie is (Ertel, 2018).
Wanneer er een groot aantal verborgen lagen in het neurale netwerk aanwezig zijn, kan er gesproken worden van diep leren. Doordat de gegevensinvoer door een groter aantal lagen verwerkt wordt, is het AI-systeem in staat om met databronnen om te gaan van verschillende abstractieniveaus zonder dat deze op
voorhand gespecifieerd moeten zijn. Daardoor heeft diep leren de capaciteiten van machinaal leren enorm verrijkt met de ontwikkeling van functionaliteiten zoals spraak- en beeldherkenning (Kühl et al., 2019).
2.1.3 Vormen van artificiële intelligentie
Naast deze drie cruciale componenten kunnen er vier verschillende vormen van artificiële intelligentie worden gedifferentieerd: natuurlijke taalverwerking, digitale beeldverwerking, expertsystemen en robotica (Kreutzer & Sirrenberg, 2020).
Een eerste vorm van artificiële intelligentie is natuurlijke taalverwerking. Deze tak houdt zich bezig met de creatie van computerprogramma’s die machines toelaten om taal te begrijpen, zowel in gesproken als geschreven vorm (Kreutzer & Sirrenberg, 2020). Onderzoek naar natuurlijke taalverwerking kan opgedeeld worden in twee domeinen. Een eerste domein analyseert taal op syntactisch niveau, zoals tekstcorrectie of geautomatiseerd samenvatten. Het tweede domein analyseert taal op semantisch niveau, zoals de vertaling van talen of spraakherkenning. Deze opdeling werd gemaakt aangezien momenteel enkel nog het tweede domein uitdagend is voor artificiële intelligentie (FlasińSki, 2016).
Naast de verwerking van taal is ook de verwerking van foto’s en video’s een tak van artificiële intelligentie. Deze vorm heet digitale beeldverwerking en houdt zich bezig met de verwerking van signalen die afbeeldingen representeren. Het resultaat ervan kan een afbeelding of dataset zijn die de karakteristieken van de afbeelding weergeeft. Het laatste wordt ook wel beeldherkenning genoemd (Kreutzer & Sirrenberg, 2020).
Een derde vorm van artificiële intelligentie zijn expertsystemen. Dat zijn computerprogramma’s die assisteren bij het oplossen van moeilijke problemen. Hun specifieke aanbevelingen zijn gebaseerd op kennis van experten die is opgeslagen in een databank. Het is dus noodzakelijk om dergelijke systemen te voorzien van een grote hoeveelheid data (FlasińSki, 2016).
De laatste tak van artificiële intelligentie houdt zich bezig met robotica. Hiermee de tweede sectie bereikt. Robotica zal in de volgende sectie uitgebreid worden besproken.
2.2 Robotica
Robotica is de overkoepelende vorm waartoe sociale robots behoren (Niku, 2010). Ook hier is een duidelijk begrip noodzakelijk. Deze sectie vangt dan ook aan met een formulering van een definitie. Vervolgens zal worden overgegaan naar de componenten (2.2.2) en types robotica (2.2.3).
2.2.1 Definitie
De definitie voor robotica is duidelijk en niet omstreden. Volgens McKerrow (1986) is robotica de discipline die zich bezig houdt met:
▪ het ontwerp, fabriceren, controleren en programmeren van robots; ▪ het gebruik van robots om problemen op te lossen;
▪ de studie van controleprocessen, sensoren en algoritmes die gebruikt worden in mensen, dieren en machines;
▪ de applicatie van deze controleprocessen en algoritmes in het ontwerp van robots.
Het wordt snel duidelijk dat iemand eerst inzicht moet hebben in de term ‘robot’ vooraleer de term robotica begrepen kan worden. Dit vormt echter een probleem, gezien de afwezigheid van een algemeen aanvaarde definitie voor de term (McKerrow, 1986).
Om de term robot te definiëren, vangt deze sectie aan met de factoren die robots differentiëren van andere machines. Wanneer een robot manipulator vergeleken wordt met een gewone manipulator (zoals een kraan), zijn er heel wat gelijkenissen. Toch is er echter één fundamenteel verschil: een robot wordt gecontroleerd door een computer die het controlepaneel bedient, terwijl een manipulator bestuurd wordt door een persoon die de actuatoren bedient. Kortom, robots zijn computergestuurd (Niku, 2010). Sectie 2.2.2 zal dieper ingaan op controllers en manipulatoren.
De Encyclopedia Brittanica (Moravec, 2019) definieert een eerste definitie voor de term ‘robot’: “Een
robot is een geautomatiseerde machine die menselijke arbeid vervangt, zonder dat de machine noodzakelijk op een mens lijkt of op een menselijke manier functioneert”. Het woord ‘geautomatiseerde’ bevestigt het
eerder aangehaalde verschil tussen robots en gewone machines. Deze definitie legt echter wel sterk de nadruk op het industriële gebruik. Veel robotapplicaties situeren zich inderdaad in fabricatieprocessen, wat de opkomst van geautomatiseerde fabrieken verklaart (McKerrow, 1986). Toch zijn er veel meer toepassingen te onderscheiden die elk de mogelijkheid hebben om een grondige impact uit te oefenen op onze samenleving, alsook om de manier van leven, leren en werken te transformeren (Reddy, 2006).
Daarom opteren we om de definitie van McKerrow (1986) te gebruiken:
“Een robot is een machine die geprogrammeerd kan worden om verschillende taken uit te voeren.”
Deze definitie is zeer flexibel en kan aangepast worden door de reikwijdte van de woorden ‘geprogrammeerd’ en ‘verschillende’ aan te passen.
2.2.2 Componenten
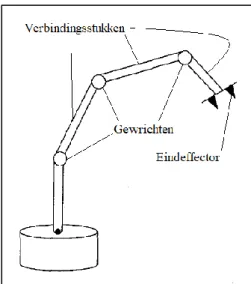
De vorige sectie haalde de componenten ‘manipulator’, ‘actuator’ en ‘controlepaneel’ reeds aan. Deze zijn noodzakelijk, maar niet voldoende om van een robot te kunnen spreken. Daarom behandelt deze sectie de componenten van een robot in meer detail. Hiervoor wordt de meest gebruikte industriële vorm onder de loep genomen, namelijk de robot manipulator (Craig, 2005). Figuur 2 geeft deze robot manipulator weer.
Figuur 2. Robot manipulator. Aangepast overgenomen van Craig, 2005
De manipulator is het lichaam van de robot (Niku, 2010). Deze bestaat uit verbindingsstukken die aan elkaar gekoppeld zijn door middel van gewrichten, die de beweging van aangrenzende verbindingsstukken mogelijk maakt (Craig, 2005). Een actuator laat de robot toe om de gewrichten en de verbindingsstukken te bewegen. Dit is meestal een elektrische motor (Niku, 2010). Aan het laatste verbindingsstuk is de
eindeffector verbonden die de nodige taken zal uitvoeren. Afhankelijk van het uiteindelijke gebruik van
de robot kan de eindeffector de vorm aannemen van een grijper, een brander, een elektromagneet of een ander toestel (Craig, 2005). Robotfabrikanten produceren doorgaans geen eindeffectoren, omdat deze zeer situatie-afhankelijk zijn. Het is dus de taak van interne ingenieurs of externe adviseurs om dergelijke eindeffectoren te maken en te verbinden met de hand van de robot (Niku, 2010). Verder worden de gewrichten uitgerust met sensoren. Daardoor kan de relatieve positionering van aaneensluitende verbindingsstukken in kaart gebracht worden (Craig, 2005). Deze informatie wordt doorgestuurd naar het
controleapparaat, dat op basis hiervan de staat waarin de robot zich verkeerd kan bepalen. Het
controleapparaat kan verder vergeleken worden met de kleine hersenen: ze hebben niet dezelfde macht als het brein, maar ze controleren nog steeds de bewegingen. Zo zal het controleapparaat door middel van instructies de actuatoren bewegen die op hun beurt de verbindingsstukken en gewrichten zullen bewegen om zo tot de gewenste handeling te komen. Op basis van de terugkoppelingssensoren kan de controller nagaan of de instructies juist werden uitgevoerd (Niku, 2010).
Voorlopig zijn alle componenten besproken die zowel aanwezig zijn in gewone manipulatoren als in robot manipulatoren. Wat de twee verder onderscheidt, is van wie de controller instructies krijgt. Bij een gewone manipulator zou het gebruik nu verder overgelaten worden aan een persoon die rechtstreeks de controller bestuurt. Bij een robot manipulator daarentegen krijgt het controleapparaat instructies van de processor (Niku, 2010). De volgende componenten zijn daarom eigen aan een robot manipulator.
De processor vult de rol in van het brein van de robot. Hij berekent op welke manier en met welke snelheid de verbindingsstukken moeten bewegen om de gewenste handelingen uit te voeren. Na de berekening zal hij de nodige instructies doorgeven aan het controleapparaat. De processor is doorgaans een
computer die zich uitsluitend bezig houdt met vorige functies. Zoals andere computers heeft het dus ook een besturingssysteem, programma’s en een monitor nodig (Niku, 2010). Naast het besturingssysteem waar de processor op draait, zijn er eveneens nog twee andere soorten software waar robots gebruik van maken. De tweede soort is de software die de berekeningen voor de verbindingsstukken uitvoert. Deze software kan zeer sterk verschillen naargelang de robot. De derde groep software zijn programma’s om de robot te gebruiken voor specifieke taken zoals assemblage of materiaalbehandeling (Niku, 2010).
Heel wat componenten zijn dus noodzakelijk om van een robot te kunnen spreken. Naast deze verschillende componenten zijn er echter ook verschillende robottypes. Dit wordt behandeld in de volgende sectie.
2.2.3 Types robotica
Niku (2020) definieerde een algemene classificatie bestaande uit vier toestellen die als robot kunnen worden aanschouwd. Belangrijke opmerking hierbij is dat een dergelijke classificatie telkens afhankelijk is van de gehanteerde definitie van een robot. Dit wil zeggen dat deze classificatie niet uitsluitend is.
1. De vaste-sequentie robot: Een toestel dat opeenvolgende stadia van een taak uitvoert. Dit volgens een vooraf bepaalde, onveranderlijke methode.
2. De afspeelrobot: Een menselijke operator voert een taak manueel uit door de robot te leiden. De robot registreert deze beweging(en) om later dezelfde taak succesvol uit te voeren. De robot herhaalt de beweging(en) op basis van de geregistreerde informatie.
3. De numeriek bestuurde robot: De operator voorziet de robot van voorgeprogrammeerde bewegingen. De taak wordt dus niet manueel aangeleerd.
4. De intelligente robot: Een robot die zijn omgeving begrijpt. Deze heeft de mogelijkheid om succesvol taken uit te voeren, ook al veranderen de condities waarin de taak moet worden uitgevoerd. Sociale robots behoren tot deze categorie.
Sociale robots zijn met andere woorden een specifiek type van het meer algemene begrip ‘robotica’, en staan centraal in dit onderzoek. Hoofdstuk 2 is dan ook toegewijd aan de sociale robot.
2.3 De sociale robot
Deze sectie kan worden beschouwd als de basis van dit onderzoek en verloopt als volgt. Om te beginnen zal er een definitie worden geformuleerd, gevolgd door de maatschappelijke relevantie en een SWOT-analyse. Vervolgens zal sectie 2.3.4 het ontwerp van sociale robots bespreken, bestaande uit de belichaming en de componenten. Om af te sluiten zullen ook de belangrijkste applicaties worden behandeld in dit hoofdstuk.
2.3.1 Definitie
De voorbije 50 jaar is er uitgebreid onderzoek gevoerd naar robots en intelligente systemen (Reddy, 2006). De definitie van een sociale robot kent enkele verschilpunten met de eerder vermelde definities van een robot. Volgens Duffy (2003) wordt een sociale robot als volgt gedefinieerd: “Een fysieke entiteit actief
in een complexe, dynamische en sociale omgeving die voldoende in staat is om zich te gedragen op een manier die bevorderlijk is voor zijn eigen doelen en die van zijn gemeenschap”. Later onderzoek van Yan,
Ang, & Poo (2013) resulteerde in een definitie van een sociale robot gebaseerd op eerdere studies. Deze definitie luidt als volgt: “Een sociale robot is een robot die aangewezen taken kan uitvoeren. De
noodzakelijke voorwaarde om van een ‘sociale’ robot te kunnen spreken is de mogelijkheid van de robot om te interageren met mensen door zich te houden aan bepaalde sociale aanwijzingen en regels”. In deze
definitie is de interactie met mensen een belangrijke component. Recent onderzoek van Sarrica, Brondi, & Fortunati (2019) ging dieper in op hoe een sociale robot overheen heel wat verschillende studies werd gedefinieerd. De studie is verdeeld in drie delen. Om te beginnen worden de meest populaire definities uit de ‘International Journal of Social Robotics’ onder de loep genomen. Op basis hiervan beschreven Sarrica, Brondi, & Fortunati (2019) een sociale robot als een autonome agent, complexe machine of een technologische applicatie. Ze moeten daarnaast ook handelen, communiceren en sociaal intelligent zijn op een menselijke manier. In deze studies komt ook de functionele component vaak naar voor. Sociale robots moeten taken uitvoeren, sociale problemen oplossen en mensen assisteren. Ten tweede werd in deze studie wetenschappelijk onderzoek opgezocht over sociale robots op Google Scholar. Op basis hiervan kon geconcludeerd worden dat sociale robots autonome of semiautonome fysieke lichamen zijn die over het algemeen menselijke of dierlijke kwaliteiten bezitten. Ze nemen omgevingsfactoren waar en reageren erop, nemen deel aan sociale interacties, communiceren, werken samen, maken beslissingen en voeren acties uit. Om af te sluiten werden ook de populairste definities op het internet in rekening gebracht. Volgens Sarrica, Brondi, & Fortunati (2019) kan aan de hand van deze definities samengevat worden dat een sociale robot de volgende eigenschappen bezit: een autonoom systeem met een fysieke belichaming dat omgevingsfactoren kan waarnemen en hierop kan reageren. Daarnaast kunnen ze ook interageren met mensen (of andere robots) en begrijpen en volgen van sociale regels.
Het bovenstaande leidt tot de presentatie van de volgende definitie:
“Een sociale robot is een autonome of semiautonome (fysieke) entiteit die taken uitvoert, sociale
problemen oplost en mensen assisteert waarbij hij in interactie treedt met mensen, andere robots en zijn omgeving, alsook sociale regels begrijpt en deze kan opvolgen.”
Belangrijke opmerking hierbij is dat de ‘interactie met mensen’ in deze definitie slaat op Mens-Robot Interactie (MRI). MRI betreft zowel de ontwikkeling van robots die deelnemen aan specifieke taken en activiteiten, als de studie van hoe mens en robot met elkaar interageren in dergelijke scenario’s (McColl,
Hong, Hatakeyama, Nejat, & Benhabib, 2015). Sectie 2.4 gaat hierop verder in, en moet ook in rekening worden gebracht voor een diepgaand begrip van deze definitie. Ook belangrijk op te merken is dat een sociale robot zowel een technologische applicatie (zie eerste argument van Sarrica, Brondi, & Fortunati (2019)), als een fysieke entiteit kan zijn (zie tweede en derde argument Sarrica, Brondi, & Fortunati (2019)).
2.3.2 Maatschappelijke relevantie
De relevantie van robotica voor industrieel gebruik zit in een opmars. In 2018 is het aantal geïnstalleerde robots met zes procent gestegen ten opzichte van 2017 (International Federation of Robotics, 2019). Hierdoor telde het aantal verkochte industriële robots 422.271 eenheden, ter waarde van USD 16,5 miljard. Desalniettemin wordt er een verschuiving verwacht van industriële robots naar sociale robots (Vincent, Taipale, Sapio, Lugano, & Fortunati, 2015). Volgens Vincent et al. (2015) beïnvloeden voornamelijk automatisatie en industriële robots de vraag naar mechanische arbeid, terwijl sociale robots ontworpen zijn om om te gaan met menselijke zorg, gezondheid, huishoudelijke taken, entertainment en verschillende andere vormen van materiële en immateriële taken. Zo komen sociale robots recentelijk meer en meer voor in restaurants, ziekenhuizen, en servicegebieden (He, Li, & Chen, 2017). Met de toenemende trend van thuisservice en gezondheidszorg, is er nood aan verbeterde navigatiesystemen, intelligente controlemechanismen en patroonherkenningstechnieken om het voor mensgerichte robots mogelijk te maken om performant te presteren in dergelijke ongestructureerde omgevingen (He et al., 2017). Bijgevolg moet er binnen de maatschappij voor de eerste keer worden nagedacht over de mogelijke gevolgen van robots. Dit niet enkel voor industriële productie, maar ook voor sociale reproductie (Vincent et al., 2015).
De relevantie van sociale robots ondergaat duidelijk een stijgende trend. Dit lijkt het gevolg te zijn van de vele sterktes en mogelijkheden van sociale robots. Desondanks zijn er natuurlijk ook zwaktes en bedreigingen gekoppeld aan dit soort robots.
2.3.3 SWOT
In de huidige wereld van productie worden intelligente machines te veel afgeschilderd als enkel en alleen robots. Deze robots nemen vaak het werk over van mensen, waardoor er een obsessie is ontstaan van ‘technologie versus arbeid’. Dit zorgde op zijn beurt voor een sociaal-politieke angst bij vele individuen namelijk de angst om vervangen te worden door zo een (sociale) robot (Botha, 2019).
Quote: “Instead of putting man and machine against each other, we can work together to create something called ‘augmented humanity” - Botha (2019, p. 1250)
Tabel 1 geeft een overzicht weer van de sterktes, zwaktes, mogelijkheden en bedreigingen van sociale robots.
Tabel 1. SWOT-analyse sociale robots
Huidige sterktes Huidige zwaktes
▪ Consistent, betrouwbaar, onuitputtelijk ▪ Kostenbesparing en verhoogde
productiviteit
▪ Begeleiding bij autismestoornissen ▪ Positieve effecten ouderenzorg (o.a. door
vergrijzing) ▪ Assisteren in gezondheidszorg ▪ Doorzettingsvermogen, inzet, beschikbaarheid ▪ Minder afleiding ▪ Privacy ▪ Belichaming
▪ Subjectiviteit van intelligentie
▪ Geen/beperkt vermogen om te geven om iets of iemand
Toekomstige mogelijkheden Toekomstige bedreigingen
▪ Alledaags fenomeen
▪ Aanpakken maatschappelijk gevoelige gebieden
▪ Optimaliseren verbale expressies (NLG) ▪ Natuurlijk en soepele interactie
▪ ‘Robonomics’
▪ Verhoogde levensverwachting
▪ Verbeterde gezondheid en levenskwaliteit ▪ Meer vrije tijd
▪ Jobcreatie
▪ Communicatie gerelateerde kwesties ▪ Balans voorkomen - mogelijkheden ▪ Effectief menselijk contact
▪ Veiligheid ▪ Vertrouwen ▪ Overnemen jobs ▪ Ethische kwesties
2.3.3.1 Sterktes (Strengths)
Zoals de quote illustreert moeten mens en machine niet tegenover elkaar worden geplaatst, maar naast elkaar. Dit gebeurt reeds bij de leidende industriële fabrikanten. De filosofie die zij hanteren, is deze waar mens en robot samenwerken in de context van ‘cobots’ (Botha, 2019). Volgens Botha (2019) zijn robots consistent, betrouwbaar en onuitputtelijk. De toepassingen van artificiële intelligentie bij sociale robots zorgen ervoor dat kosten kunnen worden bespaard en de productiviteit kan stijgen. Sociale robots zijn dus een stimulans voor economische groei. Overheden zien robots dan ook als een hulpmiddel in zowel industriële - als thuisomgevingen (Broadbent, 2017).
Ten tweede spelen sociale robots reeds een rol in de behandeling van kinderen met een autismespectrumstoornis (Sartorato, Przybylowski, & Sarko, 2017). Volgens ditzelfde onderzoek gaat deze
stoornis gepaard met moeilijkheden bij communicatie, sociaal contact, herhaaldelijke gedragingen en beperkte interesses. Kinderen met autisme gaan proactief contact aan met sociale robots en zijn spraakzamer in het bijzijn ervan (ook tegenover volwassenen aanwezig in dezelfde ruimte). Bijkomend zijn dergelijke robots in staat om de aandacht van het kind in kwestie te trekken en kunnen ze het kind zijn sociale angsten significant verminderen (Sartorato, Przybylowski, & Sarko, 2017).
Daarnaast is er door de vergrijzing van de westerse populatie een toenemende nood aan nieuwe technologieën die ouderen assisteren in hun dagelijkse leven (Broekens, Heerink, & Rosendal, 2009). De snelle ontwikkeling van dergelijke technologieën en robotica resulteren in producten die een grote rol spelen om dit probleem op te lossen. Broekens et al. (2009) concludeerden dat er al enig bewijs is dat sociale robots positieve effecten hebben op de gezondheidszorg voor ouderen. Sociale robots hebben op z’n minst een positief effect op het humeur, eenzaamheid en sociaal contact. Ook Broadbent (2017) is het hiermee eens. Volgens zijn onderzoek leveren sociale robots een aantal voordelen op aan ouderen. Zo verminderen ze niet enkel eenzaamheid, maar ook problematisch gedrag en depressie. Bovendien bevorderen sociale robots ook de gezondheidszorg in het algemeen. Broadbent (2017) stelt dat sociale robots in de gezondheidszorg reeds ontwikkeld worden om te assisteren bij fysieke taken, cognitieve problemen, gezondheidsmanagement (zoals monitoren van de bloeddruk) en psychosociale problemen. Denk maar aan de meest gecommercialiseerde robot Paro, waar reeds duizenden exemplaren van verkocht zijn over Europa. Dergelijke robots hebben nog andere voordelen ten opzichte van mensen, zoals meer doorzettingsvermogen, meer inzet, een hogere beschikbaarheid en minder afleiding (Broadbent, 2017).
2.3.3.2 Zwaktes (Weaknesses)
Een eerste belangrijke zwakte bij sociale robots is privacy. Recent onderzoek van Lutz & Tamó-Larrieux (2020) bevestigde dit. Dit onderzoek leverde bewijs van zowel informationele als fysieke privacy zorgen bij sociale robots. Fysieke zorgen betreffen deze waar de robot toegang heeft tot de omgeving van het individu en zijn persoonlijke ruimte. Informationele privacy daarentegen handelt over de mogelijkheid van de robot om informatie over de gebruiker te verzamelen en gebruiken.
Daarnaast voorziet het onderzoek van Duffy (2006) een overzicht van vijf fundamentele beperkingen/zwaktes van sociale robotica. De belangrijkste is dat sociale robots, en alle andere mechanische systemen, op beperkingen stuiten qua belichaming. De verschillende onderdelen worden namelijk relatief onafhankelijk van elkaar geproduceerd. Hierdoor is een ontwerper van sociale robots beperkt door zaken als de fysische en chemische eigenschappen van de gebruikte materialen, alsook door de bestaande ontwerptechnieken en methodologieën. Evolutionair en biologisch-geïnspireerde roboticastudies trachten deze kloof tussen natuurlijke - en kunstmatige systemen te overbruggen. Toch kunnen deze discrepanties niet volledig teniet worden gedaan (Duffy, 2006).
Belichaming is niet de enige zwakte betreffende het ontwerp van sociale robots. Zoals vermeld in sectie 2.2.3 kunnen sociale robots worden gecategoriseerd als intelligente systemen. Echter hebben onderzoekers
volgens Persson, Laaksolahti, & Löonnqvist (2002) weinig weet over wat echte intelligentie of intentie is. Volgens hen bestaat er zelf onzekerheid of deze zaken wel bestaan bij niet menselijke entiteiten, en zijn ze met andere woorden een subjectief gegeven. Daarom kan er geen intelligentie worden gecreëerd onafhankelijk van een gebruiker. Bij het ontwerpen van intelligente agenten (zoals sociale robots) is het dus noodzakelijk dat ontwerpers afwegen hoe gebruikers dergelijke systemen zullen ontvangen, begrijpen en interpreteren (Persson, Laaksolahti, & Löonnqvist, 2002). Ook dit kan worden aanzien als een huidige zwakte, aangezien de vrijheid voor het ontwerpen van sociale robots opnieuw wordt beperkt.
Vervolgens is het volgens Lin, Abney, & Bekey (2011) zo dat sociale robots niet het vermogen hebben om te geven of bezorgd te zijn om mensen. Dergelijke robots hebben namelijk geen architecturale - of berekeningsmechanismen die het mogelijk maken om zich te kunnen bekommeren om iets of iemand. Dit komt voornamelijk omdat er simpelweg niet geweten is wat nodig is om dergelijke capaciteiten aan sociale robots toe te kennen (Lin, Abney, & Bekey, 2011).
2.3.3.3 Mogelijkheden (Opportunities)
Op basis van het enorme spectrum aan sociale robots zoals Paro, Robear, Care-O-bot, Pepper en Sophia, concluderen Korn, Bieber, & Fron (2018) dat sociale robots, mede dankzij artificiële intelligentie, een alledaags fenomeen kunnen worden. Daarnaast konden ze ook besluiten dat de meeste experts ervan overtuigd zijn dat sociale robots uiteindelijk ook gevoelige maatschappelijke taken, zoals emotioneel gezelschap, op zich zullen kunnen nemen. Een belangrijk aspect van sociale conversaties is een vlotte, flexibele taalkundige interactie (Foster, 2019). Dialogen zijn de basis van de menselijke communicatie, waarbij onbeperkte verbale uitdrukkingen worden gecombineerd met non-verbale acties. Zowel spreker als luisteraar maken gebruik van gebaren en gezichtsuitdrukkingen. Volgens Foster (2019) benutten de meeste ontwikkelaars niet alle opportuniteiten met betrekking tot deze onbeperkte verbale expressies. Al bestaan er reeds robots die kunnen deelnemen aan sociale interacties, zijn de functionaliteiten nog beperkt. Daarom is het noodzakelijk dat ze de meest recente componenten voor audiovisuele verwerking, sociale signaalverwerking, actieselectie en robotnavigatie implementeren. Natuurlijke taalgeneratie (NTG) is hiervoor noodzakelijk. Dit is een deelgebied van computerlinguïstiek dat zich bezig houdt met de geautomatiseerde productie van hoge kwaliteit gesproken of geschreven inhoud van menselijke talen (Foster, 2019).
Over het algemeen kan er gesteld worden dat er onderzoek wordt gevoerd naar en gewerkt wordt aan sociale robots waarbij de interactie op een zo natuurlijk en soepel mogelijke manier kan verlopen (Kirby, Forlizzi, & Simmons, 2010). Webster & Ivanov (2019) verwachten dat RAIA-technologieën (Robotica, Artificiële Intelligentie, en Automatisatie) in de toekomst nog sneller zullen evolueren. Ze gaan dus nog een stapje verder, en zijn ervan overtuigd dat een groot deel van de goederen en diensten door RAIA-technologieën zullen worden voorzien. In deze context kan er gesproken worden van ‘Robonomics’. Volgens dezelfde paper zijn de meningen verdeeld wat betreft de toekomst van robotica en AI. Sommigen
stellen zich eerder angstig op, en denken zelfs dat dergelijke AI-technologieën de mensheid zullen uitroeien. Anderen zijn daarentegen heel optimistisch, en zien de mogelijkheden van robotica en AI (en andere technologieën) als de ultieme utopische oplossing voor alle menselijke problemen. Toch is de meerderheid van de auteurs eerder pragmatisch, en beschouwen ze AI en robotica als een economisch systeem dat kan zorgen voor verhoogde levensverwachtingen, verbeterde gezondheid en levenskwaliteit, meer vrije tijd en nog veel meer (Webster & Ivanov, 2019). Europa stelde zo in 2013 een strategische agenda op voor robots, waarin ze onder andere verwachtten dat tegen 2020 robots een positieve impact zouden hebben op jobcreatie (euRobotics AISBL, 2013). In welke mate deze voorspelling ook realiteit is geworden, is moeilijk in te schatten.
2.3.3.4 Bedreigingen (Threats)
Ook al is de toekomst van sociale robots veelbelovend, toch zijn er enkele bedreigingen voor deze technologie. Baillie et al. (2019) geven een aantal van deze bedreigingen overzichtelijk weer. Ut infra zijn de belangrijkste opgesomd:
▪ Communicatie gerelateerde kwesties: De ondersteuning van sociale interacties door cognitieve en emotionele technologieën en natuurlijke interacties.
▪ Beheren van de balans voorkomen - mogelijkheden: Enerzijds moet fysiek contact of dichtbij de robots staan mogelijk zijn. Anderzijds mogen de mogelijkheden van een sociale robot niet worden overschat.
▪ Verzekeren dat interactiemethoden en -ontwerpen met en van sociale robots de nood aan effectief menselijk contact niet teniet doen.
Door dit laatste element zijn dan ook heel wat onderzoekers bezorgd over het gebruik van dergelijke technologieën, zeker bij kinderen (Broadbent, 2017). Onderzoekers stellen namelijk dat er zich een cultuur zal ontwikkelen waar kinderen het vermogen niet hebben om van eenzaamheid te genieten en tijd te besteden aan zelfreflectie. Zo kunnen relaties met mobiele apparaten, en ook robots, nefast zijn voor relaties met medemensen (Broadbent, 2017).
Daarnaast liggen de bedreigingen van sociale robots niet enkel meer in de productie, maar ook in de veiligheid en betrouwbaarheid. Dit wordt beschreven in de studie van Salem, Lakatos, Amirabdollahian, & Dautenhahn (2015). Aangezien interacties met robots steeds vaker in informele, ongestructureerde omgevingen (zoals in het huishouden) zullen plaatsvinden, en dit zonder toezicht van experts, zullen robotica en MRI een aantal uitdagingen moeten overwinnen. Zo moet de technische veiligheid en operationele betrouwbaarheid gegarandeerd kunnen worden. Tegelijkertijd moet het wel mogelijk zijn voor gebruikers om de sociale robot aan te passen aan persoonlijke voorkeuren. Volgens hen is ook vertrouwen cruciaal om effectieve relaties op te bouwen. Zeker wanneer cruciale beslissingen genomen moeten worden. Vertrouwen is dus een stimulans voor de acceptatie van de robot in zijn rol als samenwerkingspartner. Hier moeten onderzoekers en ontwerpers dus rekening mee houden.
Volgens Smith & Anderson (2014) verwacht zo goed als de helft van de experten dat robots en digitale agenten tegen 2025 een significant aantal jobs van zowel arbeiders als bedienden zullen overnemen. Dit zou bijgevolg leiden tot een verhoging van de inkomensongelijkheid, stijgende aantallen in werkloosheid en zelfs tot een verstoring van de sociale orde. Deze bedreiging moet natuurlijk wel in perspectief worden geplaatst. Zo zijn er ook een groot aantal experten die het hier niet mee eens zijn. Kijk maar naar de quote van Botha (2019) van hierboven, alsook naar de verwachtingen van de Europese Unie. Baillie et al. (2019) voegen daar nog aan toe dat het niveau van de gebruikersbetrokkenheid en de bereidheid tot samenwerking met een sociale robot een uitdaging is waar rekening mee gehouden moet worden.
Verder worden er de laatste jaren steeds meer vragen gesteld over ethische kwesties (Leite, Martinho, & Paiva, 2013). Wanneer mensen regelmatig in interactie treden met een object of een ander persoon, schept het individu een band met de entiteit in kwestie. Tegenwoordig zijn mensen al gehecht aan bijvoorbeeld hun smartphone. Dit probleem kan volgens Leite et al. (2013) relevanter worden als deze artefacten levensechte vaardigheden bezitten. Ten slotte moet er volgens Baillie et al. (2019) ook rekening gehouden worden met verschillen overheen regio’s, organisaties, culturen, praktijken en verwachtingen tussen de vele stakeholdergroepen.
Deze analyse geeft duidelijk weer dat sociale robotica een interessant studiegebied is. De nadelen en bedreigingen mogen zeker en vast niet genegeerd worden, maar deze technologie heeft veel potentieel om zich te ontwikkelen tot een technologie die zich nestelt in de maatschappij. Maar hoe ziet zo een sociale robot er nu uit? En waar zijn ze reeds actief? Op deze vragen trachten de volgende twee secties een antwoord te formuleren.
2.3.4 Ontwerp van sociale robots
2.3.4.1 Virtueel - en fysiek belichaamde agenten
In het ontwerp van sociale robots is belichaming een veel besproken onderwerp. Sociale robots worden overheen de literatuur (te) vaak voorgesteld als enkel fysieke agenten. Denk maar aan de robots Probo (Saldien, Goris, Vanderborght, Vanderfaeillie, & Lefeber, 2010), Kismet (Breazeal, 2003), Paro (Sabanovic et al., 2013), Autom (Kidd & Breazeal, 2008), Aibo (François, Powell, & Dautenhahn, 2009), Robovie (Sabelli, Kanda, & Hagita, 2011), iCat (Leite et al., 2009) en nog veel meer. Jung & Lee (2004) beweren dat de vraag of sociale robots al dan niet fysiek belichaamd moeten worden één van de meest fundamentele is in dit onderzoeksgebied. Fong, Nourbakhsh, & Dautenhahn (2003) definiëren belichaming als “hetgeen
een basis legt voor structurele koppeling door de creatie van een mogelijkheid tot wederzijdse beïnvloeding van systemen en diens omgeving”. Een sociaal interactieve robot is volgens hen dan ook elke robot waarvoor
sociale interactie een sleutelrol speelt. Ze leiden hieruit af dat sociale robots niet noodzakelijk een fysieke belichaming nodig hebben, en dus ook virtuele agenten tot dit type robots behoren.
Toch tonen de bovenstaande voorbeelden aan dat sociale robots eerder fysiek belichaamd worden. Jung & Lee (2004) concluderen dat dergelijke fysieke belichaming een gevoel van sociale aanwezigheid opwekt bij gebruikers. Dit zou volgens hen resulteren in een positievere evaluatie van de robot. Volgens Holz, Dragone, & O’Hare (2008) is dit onmiddellijk het grootste voordeel ten opzichte van virtuele agenten. Het gevoel van aanwezigheid stimuleert vertrouwen en betrokkenheid, en gebruikers lijken daarom dergelijke belichaming te prefereren in één-op-één interacties. Ook Seo et al. (2015) zijn het hiermee eens. Zij concludeerden dat mensen zich beter kunnen inleven in fysieke sociale robots. Empathie is volgens hen een belangrijke factor voor een effectieve mens-robot interactie.
Desalniettemin onderzochten Thellman et al. (2016) of fysieke agenten een hoger niveau van waargenomen sociale aanwezigheid oproepen dan virtuele agenten, of fysieke agenten een hogere sociale invloed hebben op gebruikers dan een virtuele agent, en of een virtuele agent die als zeer sociaal aanwezig wordt ervaren een hogere sociale invloed heeft. Enkel de laatste hypothese werd bevestigd, wat tegenstrijdig is met het bovenstaande. Daarnaast hebben virtuele agenten ook enkele voordelen ten opzichte van fysiek belichaamde robots. Zo zijn ze in staat om dingen te doen die niet mogelijk zijn in de echte wereld, zoals veranderen van vorm (Holz, Dragone, & O’Hare, 2008). Een gebruiker zou bijvoorbeeld kunnen kiezen hoe zijn sociale assistent eruit ziet, wat de acceptatie ervan ten goede kan komen. Daarnaast kunnen ze volgens hen ook een hoger niveau van antropomorfisme bereiken met uitermate expressieve interfaces die gebruikers naargelang de wensen eenvoudig kunnen aanpassen en personaliseren. De expressieve capaciteiten van belichaamde robots zijn nog steeds beperkt vergeleken met die van virtuele agenten. Daardoor zijn belichaamde robots minder in staat om subtielere betekenissen van intenties en emoties over te brengen (Holz, Dragone, & O’Hare, 2008).
2.3.4.2 Robotbelichaming en antropomorfisme
De studie van Duffy (2003) was één van de eerste die de rol van antropomorfisme in de belichaming van robots onderzocht. Hij definieerde antropomorfisme als de toekenning van menselijke eigenschappen aan niet-menselijke entiteiten om hun acties beter te kunnen rationaliseren. Antropomorfiseren maakt het mogelijk om niet-menselijke entiteiten toch te behandelen als rationele agenten die zelf hun acties kiezen op basis van hun eigen geloof en verlangens.
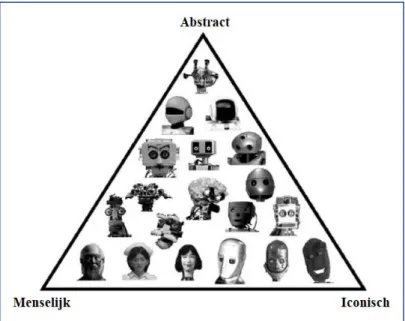
Er kunnen drie gradaties van antropomorfisme onderscheiden worden (zie Figuur 3):
▪ Abstract: Een mechanisch functioneel ontwerp met een minimaal menselijk uiterlijk. ▪ Iconisch: Een minimum aan menselijke kenmerken dat de robot toelaat zich uit te drukken. ▪ Menselijk: Een zo compleet mogelijke nabootsing van de mens.
Figuur 3. Antropomorfische driehoek toegepast op robothoofden. Aangepast overgenomen van Duffy, 2003 Toch hebben slechts enkele studies het fenomeen van antropomorfisme bestudeerd. Dat komt omdat antropomorfisme eerder als een hinderpaal wordt gezien in de wetenschap dan als een onderzoeksonderwerp. Een gevolg daarvan is dat er ook zeer veel onbeantwoorde vragen zijn rond antropomorfisme: “Bestaat er een optimaal niveau van antropomorfisme?”, “Wat is de ideale combinatie van menselijke kenmerken die de sociale functies van een robot optimaliseert?”, en “Wanneer gaat antropomorfisme te ver?”.
Jung & Lee (2004) trachtten antwoorden te vinden op deze vragen. In een eerste experiment gingen ze na of sociale robots anders gepercipieerd werden indien ze fysiek belichaamd werden. Daaruit stelden ze vast dat fysiek belichaamde sociale robots aantrekkelijker waren dan virtuele sociale robots. Daarnaast werd de sociale aanwezigheid van fysiek belichaamde sociale robots als groter ervaren, wat resulteert in een algemeen positievere evaluatie. In een tweede experiment gingen ze na wat het effect was van een aanraakinvoer-functie op de relatie tussen robot en mens. De afwezigheid van dergelijke functie werd als negatief ervaren. Veel deelnemers hoopten namelijk op complexe interacties met de sociale robot vanwege zijn antropomorfische gedaante.
Later onderzoek van Hegel, Krach, Kircher, Wrede, & Sagerer (2008) bestudeerde eveneens de antropomorfische voorstelling van sociale robots, zowel op neuraal - als gedragsniveau. Op neuraal niveau werd een verhoogde activiteit van de corticale gebieden vastgesteld, die geassocieerd worden met mentalisatie. Daaruit kan afgeleid worden dat het brein zeer makkelijk te misleiden is in het denken dat met een menselijk wezen gecommuniceerd wordt, terwijl dat niet het geval is. Op gedragsniveau ervaarden deelnemers meer plezier en hadden ze meer sympathie voor de robot naarmate de robot een hogere graad van antropomorfisme toonde. Daarnaast wezen de deelnemers een hogere intelligentie toe aan robots die er menselijker uitzagen.
Uit vorige studies wordt vastgesteld dat mensen eerder geneigd zullen zijn om robots te accepteren naarmate ze menselijker voorgesteld worden. Een nadeel van een antropomorfische voostelling is echter wel dat mensen er bepaalde bekwaamheden mee gaan associëren. Wanneer die verwachtingen niet worden ingevuld, kan dat leiden tot teleurstelling. Teruggekoppeld naar de antropomorfische driehoek zou een robot een balans moeten bereiken tussen menselijk, iconisch en abstract. Een beperkte hoeveelheid van antropomorfisme is dus de ideale oplossing voor een niet-menselijke entiteit. Dit komt overeen met het midden van de driehoek (Duffy, 2003).
2.3.4.3 Systeemcomponenten
Zeven systeemcomponenten waardoor sociale robots zich onderscheiden van andere soorten robots zullen in kaart gebracht worden.
Vooraleer robots kunnen worden aanzien als sociale wezens, moeten ze eerst de gebieden voor sociale cognitie van het menselijk brein initialiseren. Een sleutelfactor daarvoor blijkt intentioneel handelen te zijn (Wiese, Metta, & Wykowska, 2017). Om intentioneel te handelen moet een robot zijn eigen doelen nastreven, die gebaseerd zijn op zijn eigen motivaties, drijfveren en emoties (Dautenhahn, 2007). Daarnaast moet een robot ook bekwaam zijn om de aandacht te vestigen op iets. Hij moet in staat zijn om een relevant object te identificeren, zijn sensoren naar dat object te richten en zijn focus op dat object te houden (Fong et al., 2003).
Een tweede systeemcomponent van sociale robots is dialoog. Deze is cruciaal aangezien er zonder dialoog geen mens-robot interactie zou zijn. Dialoog kan verschillende vormen aannemen. Toch kunnen drie primaire niveaus onderscheiden worden (Fong et al., 2003):
▪ Pre-linguïstische dialoog: Dit is het laagste niveau waarbij de robot woorden leert door tijdruimtelijke associaties te maken. Dit is gelijkaardig aan een hond die weet wat het woord ‘bal’ betekent.
▪ Non-verbale dialoog: Voorbeelden zijn gebaren of lichaamshouding. Omdat de meeste robots slechts in beperkte mate capabel zijn om taal te herkennen en te reproduceren, zijn non-verbale dialogen een nuttig alternatief.
▪ Natuurlijk taalgebruik: Dit is het hoogste niveau, waarbij de robot op een menselijke manier communiceert. Tot op de dag van vandaag blijft het een grote uitdaging om dit te verwezenlijken. Ongeacht het niveau is dialoog enkel betekenisvol wanneer de woorden of gebaren die beide partijen gebruiken dezelfde begrippen beschrijven.
Een derde systeemcomponent van sociale robots zijn emoties. Deze zijn cruciaal voor een waardevolle mens-robot interactie, wat zorgt voor een toenemende integratie in robotontwerpen. Een andere reden waarom artificiële emoties worden gebruikt, is dat ze de gebruiker toelaten om de interne staat, doelen en intenties van de robot te bepalen. Daarnaast kunnen emoties gebruikt worden als controlemechanismen om na te gaan hoe de robot wordt beïnvloed door verschillende factoren (Fong et al., 2003). Sectie 2.5 zal emoties in sociale robots verder bespreken.
Zowel de manier waarop een sociale robot in dialoog treedt, als de emoties die hij uitdrukt, laten sociale robots toe om een bepaalde persoonlijkheid te creëren. Naast dialoog en emoties zijn er ook andere wegen om een persoonlijkheid op te wekken. Zo draagt de belichaming van een robot en diens bewegingen ook sterk bij tot de ontwikkeling van een persoonlijkheid. Ten slotte kan de taak van de robot invloed hebben op de manier waarop zijn persoonlijkheid wordt gepercipieerd (Fong et al., 2003). Eerder onderzoek toont aan dat mensen verkiezen te communiceren met sociale robots die een persoonlijkheid hebben die complementair is aan hun eigen persoonlijkheid. Daarnaast werd er eveneens een hogere intelligentie en sociale aanwezigheid toegekend aan sociale robots met complementaire persoonlijkheden (Lee, Peng, Jin, & Yan, 2006).
Sociale robots moeten echter niet alleen bekwaam zijn om menselijke karakteristieken zoals emoties uit te drukken, maar ze moeten ze ook kunnen detecteren bij mensen. Zonder perceptuele mogelijkheden zou een robot geen zicht hebben op zijn omgeving. Als basis zouden robots moeten beschikken over visuele sensoren, audiosensoren, tactsensoren en sensoren voor afstandsmeting. Het is echter wel belangrijk dat het aantal verschillende sensoren en de mate waarin deze zijn ontwikkeld sterk afhangt van de robotapplicatie (Yan, Ang, & Poo, 2013). Bij sociale robots ligt de focus op mensgerichte perceptie, de vijfde systeemcomponent. Daarvoor moeten ze menselijke karakteristieken zoals spraak, gezichtsuitdrukkingen en lichaamstaal kunnen detecteren en interpreteren. Het merendeel van mensgeoriënteerde perceptie steunt op passieve waarneming zoals computervisie en spraakherkenning. Dergelijke sensoren zijn vaak goedkoop en kunnen gebruikt worden voor een grote verzameling aan perceptuele taken (Fong et al., 2003).
De sociale robot kan de waargenomen menselijke karakteristieken daarna gebruiken voor
gebruikersmodellering, waarbij hij de gebruiker toewijst aan een gebruikersmodel dat bestaat uit een set
van attributen en een gebruiker of groep van gebruikers beschrijft. Informatie omtrent gebruikers kan expliciet verzameld worden door bijvoorbeeld enquêtes af te nemen, maar ook impliciet aan de hand van observaties. Expliciete verzamelingen kunnen zeer tijdrovend zijn, terwijl impliciete verzamelingen meestal moeilijker zijn. Dit is zeker het geval wanneer de populatie divers is. Dergelijke modellen worden gebruikt voor verschillende einddoelen. Allereerst helpen ze de robot om menselijk gedrag en menselijke dialogen te begrijpen. Ten tweede geven ze vorm aan de feedback die naar de gebruikers wordt verstuurd. Zo kunnen robotbewegingen en het spreektempo van de robot gedirigeerd worden. Ten slotte stellen ze de robot in staat om aan de noden van gebruikers met verschillende vaardigheden, ervaring of kennis te voldoen (Fong et al., 2003).
De zevende en laatste systeemcomponent zijn de sociale leerprocessen, waar heel wat onderzoek omtrent robotica zich op focust. Enerzijds worden sociale modellen geïmplementeerd in robots om een beter inzicht te krijgen in sociale leerprocessen van mens en dier. Anderzijds is er het belang om robots te bouwen die op zichzelf nieuwe kennis kunnen verwerven om zo complexer en vaardiger te worden (Breazeal & Scassellati, 2002). Dat laatste is eveneens de reden waarom sociale leerprocessen gebruikt worden in sociale robots. Doordat de kennis van de leraar of het model vaak verschillend is van de kennis
van de robot, kunnen sociale robots nieuwe vaardigheden aanleren en informatie verwerven. Dat maakt sociaal leren essentieel in het creëren van een betere mens-robot interactie (Fong et al., 2003).
Deze systeemcomponenten dragen bij aan de inzetbaarheid van sociale robots. Ze zorgen er namelijk voor dat sociale robots heel wat toepassingsmogelijkheden hebben. De belangrijkste worden bestudeerd in wat volgt.
2.3.5 Applicaties
2.3.5.1 Autismebehandeling
Sociale robots worden meer en meer gebruikt als hulpmiddel in de behandeling van autisme bij kinderen. Ze worden ingezet om de sociale, emotionele en communicatieve tekortkomingen van de kinderen weg te werken. De laatste jaren is de interesse in dit onderzoeksveld enorm gegroeid, wat studies van over de hele wereld met zich mee heeft gebracht. Uit die studies is er een groot aantal sociale robots gecreëerd die verschillend zijn op gebied van uiterlijk, gedrag en taken die ze kunnen uitvoeren. Er kan vastgesteld worden dat er een soort zoo van sociale robots is ontstaan die voldoen aan individuele noden van kinderen met autisme. Cabibihan, Javed, Ang, & Aljunied (2013) bestudeerden er 23 hiervan en konden volgende rollen categoriseren:
▪ Diagnosticerend agent: Autisme is moeilijk waar te nemen voor de leeftijd van drie jaar, omdat de patronen die nodig zijn om de diagnose vast te stellen nog niet volledig ontwikkeld zijn. Toch is een vroegtijdige diagnose essentieel om de verbeteringskansen van het kind significant te verhogen. Sociale robots kunnen hierin op verschillende manieren een rol spelen. Zo is het belangrijk om tijdens de eerste levensjaren te kijken hoe een kind reageert op steeds identieke acties. Terwijl mensen het misschien moeilijk vinden om steeds identieke acties te herhalen overheen een langere periode, doen robots dit van nature.
▪ Speelvriend: Spelen vervult een zeer belangrijke functie in de sociale ontwikkeling van kinderen. Kinderen met autisme krijgen echter vaak niet de kans om met leeftijdsgenoten te spelen door hun onderontwikkelde sociale en communicatieve capaciteiten. Hierdoor zonderen ze zich vaak af en besluiten ze in isolatie te spelen. Spelletjes met sociale robots creëren een veilige omgeving waardoor het kind zichzelf kan zijn zonder angst.
▪ Gedrag opwekkende agent: Al spelend kunnen sociale robots specifieke vaardigheden aanleren, gewenst gedrag uitlokken, en de nodige positieve feedback geven. Vaak aangeleerd gedrag bevat onder meer imitatie en oogcontact.
▪ Sociaal bemiddelaar: Een sociale robot kan optreden als sociaal bemiddelaar door het kind zo te trainen dat het zijn aangeleerde vaardigheden doorgeeft aan zijn leeftijdsgenoten. Dit wordt mogelijk gemaakt door sessies waarin twee of meerdere kinderen samen in interactie treden met een sociale robot.
▪ Sociaal agent: Kinderen met autisme zijn niet in staat om sociale skills te ontwikkelen naargelang ze ouder worden omdat de interactie met hun omgeving zeer belemmerd is. Aan de hand van sociale robots leren de kinderen afhankelijk van de context welk gedrag gepast is. ▪ Persoonlijke therapeut: Sociale robots voorzien een persoonlijke behandeling voor ieder kind op
basis van zijn voorkeuren, tekortkomingen en noden. Daarnaast laat het robotontwerp toe om uiterlijke kenmerken aan te passen naar de wensen van het kind. Zo zouden de ogen van een robot kunnen aangepast worden indien het kind zich daardoor geïntimideerd voelt. Ook de complexiteit van de taken wordt continu aangepast zodat het kind blijft leren.
Daarnaast waren Cabibihan et al. (2013) in staat om volgende kenmerken te onderscheiden die sociale robots effectiever maken in de behandeling van autisme:
▪ Robots zijn minder complex dan mensen: Robots zijn simpeler en voorspelbaarder dan mensen. Daardoor is het voor een kind makkelijker om instructies te volgen van een robot dan van een mens. Door robots in te zetten worden kinderen niet geïntimideerd door de complexiteit van verbale en non-verbale communicatie, wat het algemene communicatieproces vergemakkelijkt. ▪ Robots maken lichamelijke interacties mogelijk: De mogelijkheid om aan te raken is iets wat traditionelere behandelingen vaak missen. Door robots te gebruiken kunnen kinderen meer fysieke interactie aangaan en bijvoorbeeld het lichaam van een robot verkennen. Daardoor voelen kinderen zich meer betrokken.
▪ Robots zijn minder intimiderend dan mensen: Robots vervullen niet enkel de rol van speelvriend, maar kunnen zelf ook gebruikt worden als speelgoed. Dit geeft de kinderen een gevoel van veiligheid gedurende de interactie.
2.3.5.2 Ouderenzorg
De ouderenzorg is een volgend therapeutisch domein waar sociale robots worden ingezet. Recent onderzoek van Abdi, Al-Hindawi, Ng, & Vizcaychipi (2018) is de eerste Systematic Literature Review (SLR) die de effecten van Sociale Assisterende Robots (SAR) voor de verbetering van de gezondheids- en sociale zorg van ouderen evalueert en categoriseert. Dit onderzoek identificeerde vijf rollen van dergelijke sociale robots.
▪ Affectieve therapie: In deze categorie hebben sociale robots de functie om de algemene stemming en welzijn van ouderen te verbeteren. Volgens Abdi et al. (2018) zijn er in totaal vijftien studies die dit onderwerp reeds onderzochten, waarvan zeven in groepsverband en acht één-op-één. Alle studies in groepsverband vertoonden positieve resultaten, zoals verminderde agitatie- en depressieniveaus, en een vertoning van meer positieve emoties bij de participanten. Twee één-op-één studies vertoonden daarentegen negatieve effecten. Hier was er een verhoogd niveau van opwinding en een verergering van dementie waar te nemen. Deze contrasterende resultaten zouden een aanwijzing kunnen zijn voor de manier waarop oudere gebruikers emotioneel voordeel kunnen halen uit SAR (Abdi et al., 2018).